Sistemas eletrônicos de estabilização (ESP, AHS, DSC, PSM, VDC, VSC)
 Esses sistemas garantem que o veículo se comporte com segurança em situações críticas, especialmente ao fazer curvas. Durante o movimento, os sistemas avaliam vários indicadores, como a velocidade ou rotação do volante e, em caso de risco de derrapagem, os sistemas podem retornar o carro à sua direção original travando cada uma das rodas. Em veículos mais caros, os sistemas de controle de estabilidade também apresentam um chassi ativo que se adapta à superfície do motorista e ao estilo de direção e contribui ainda mais para a segurança na direção. A maioria dos carros usa um sistema de marcação em seus veículos. ESP (Mercedes-Benz, Skoda, VW, Peugeot e outros). Com marcação AHS (Sistema de processamento ativo) usados pela Chevrolet em seus veículos, DSC (Controle de segurança dinâmico)BMW, PSM (Sistema de gerenciamento de estabilidade Porsche), V DC (Controle de dinâmica do veículo) está instalado em carros Subaru, VSC (Controle de estabilidade do veículo) também está instalado em veículos Subaru, bem como Lexus.
Esses sistemas garantem que o veículo se comporte com segurança em situações críticas, especialmente ao fazer curvas. Durante o movimento, os sistemas avaliam vários indicadores, como a velocidade ou rotação do volante e, em caso de risco de derrapagem, os sistemas podem retornar o carro à sua direção original travando cada uma das rodas. Em veículos mais caros, os sistemas de controle de estabilidade também apresentam um chassi ativo que se adapta à superfície do motorista e ao estilo de direção e contribui ainda mais para a segurança na direção. A maioria dos carros usa um sistema de marcação em seus veículos. ESP (Mercedes-Benz, Skoda, VW, Peugeot e outros). Com marcação AHS (Sistema de processamento ativo) usados pela Chevrolet em seus veículos, DSC (Controle de segurança dinâmico)BMW, PSM (Sistema de gerenciamento de estabilidade Porsche), V DC (Controle de dinâmica do veículo) está instalado em carros Subaru, VSC (Controle de estabilidade do veículo) também está instalado em veículos Subaru, bem como Lexus.
A abreviatura ESP vem do inglês Programa de estabilidade eletrônica e significa programa de estabilização eletrônico. Pelo próprio nome, fica claro que este é um representante dos assistentes de motorista eletrônicos em termos de estabilidade de direção. A descoberta e subsequente implementação do ESP foi um grande avanço na indústria automotiva. Uma situação semelhante aconteceu uma vez com a introdução do ABS. ESP ajuda o motorista inexperiente e altamente experiente a lidar com algumas das situações críticas que podem surgir durante a condução. Vários sensores no carro registram os dados de direção atuais. Esses dados são comparados através da unidade de controle com os dados calculados para o modo de condução correto. Quando uma diferença é detectada, o ESP é automaticamente ativado e estabiliza o veículo. ESP usa outros sistemas de chassis eletrônicos para sua função. Os trabalhadores electrónicos mais importantes incluem o sistema de travagem anti-bloqueio ABS, sistemas anti-derrapagem (ASR, TCS e outros) e conselhos sobre o funcionamento dos sensores ESP necessários.
O sistema foi desenvolvido por engenheiros da Bosch e Mercedes. O primeiro carro a ser equipado com ESP foi o cupê de luxo S 1995 (C 600) em março de 140. Alguns meses depois, o sistema também chegou ao clássico Classe S (W 140) e ao SL Roadster (R 129). O preço deste sistema era tão alto que no início o sistema só era padrão em combinação com o motor 6,0 V12 de doze cilindros de ponta, para outros motores ESP era oferecido apenas por uma sobretaxa pesada. O verdadeiro boom da PES foi devido a coisas aparentemente pequenas e, em certo sentido, coincidência. Em 1997, jornalistas suecos realizaram um teste de estabilidade para a novidade da época, que era o Mercedes A. Para grande surpresa de todos os presentes, o Mercedes A não aguentou o chamado teste do alce. Isso marcou o início de um negócio que obrigou os fabricantes a suspender a produção por um curto período. Os esforços dos técnicos e projetistas da Fábrica de Automóveis de Stuttgart para encontrar a solução certa para o problema foram coroados de sucesso. Com base em vários testes, o ESP tornou-se uma peça padrão do Mercedes A. Isso, por sua vez, significou um aumento na produção desse sistema das esperadas dezenas de milhares para centenas de milhares, e preços mais acessíveis puderam ser alcançados. O ESP abriu caminho para o uso em veículos médios e pequenos. O nascimento do ESP foi uma verdadeira revolução no campo da direção segura e hoje está relativamente difundido, não apenas graças à Mercedes-Benz. A existência do ESP, que está em desenvolvimento e atualmente é o seu maior fabricante, muito contribuiu para a existência do ESP.
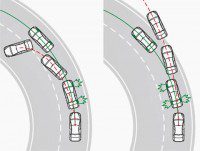
Na maioria dos sistemas eletrônicos, o cérebro é a unidade de controle eletrônico, e esse não é o caso do ESP. A tarefa da unidade de controle é comparar os valores reais dos sensores com os valores calculados durante a condução. A direção necessária é determinada pelo ângulo de rotação e pela velocidade de rotação das rodas. As condições reais de direção são calculadas com base na aceleração lateral e na rotação do veículo em torno de seu eixo vertical. Se for detectado um desvio dos valores calculados, o processo de estabilização é ativado. A operação do ESP regula o torque do motor e afeta o sistema de frenagem de uma ou mais rodas, eliminando assim o movimento indesejado do veículo. O ESP pode corrigir a subviragem e a sobreviragem nas curvas. A subviragem do veículo é corrigida travando a roda interna traseira. A sobreviragem é corrigida travando a roda dianteira externa. Ao travar uma determinada roda, são geradas forças de travagem nessa roda durante a estabilização. De acordo com uma simples lei da física, essas forças de frenagem criam torque em torno do eixo vertical do veículo. O torque resultante sempre neutraliza movimentos indesejados e, assim, retorna o veículo na direção desejada nas curvas. Ele também vira o carro na direção certa quando não está virando. Um exemplo de operação do ESP é uma curva rápida quando o eixo dianteiro sai rapidamente da curva. O ESP primeiro reduz o torque do motor. Se esta ação não for suficiente, a roda interna traseira é travada. O processo de estabilização continua até que a tendência à derrapagem seja reduzida.
O ESP é baseado em uma unidade de controle comum ao ABS e outros sistemas eletrônicos, como o distribuidor de força de frenagem EBV / EBD, regulador de torque do motor (MSR) e sistemas antiderrapantes (EDS, ASR e TCS). A unidade de controle processa dados 143 vezes por segundo, ou seja, a cada 7 milissegundos, o que é quase 30 vezes mais rápido que o de um humano. O ESP requer vários sensores para operar, como:
- sensor de detecção de freio (informa a unidade de controle cujo motorista está freando),
- sensores de velocidade para rodas individuais,
- sensor de ângulo do volante (determina a direção de deslocamento necessária),
- sensor de aceleração lateral (registra a magnitude das forças laterais atuantes, como a força centrífuga na curva),
- um sensor de rotação do veículo em torno do eixo vertical (para avaliar a rotação do veículo em torno do eixo vertical e determinar o estado atual de movimento),
- sensor de pressão de freio (determina a pressão atual no sistema de freio, a partir da qual as forças de frenagem e, portanto, as forças longitudinais que atuam no veículo podem ser calculadas),
- sensor de aceleração longitudinal (somente para veículos com tração nas quatro rodas).
Além disso, o sistema de frenagem requer um dispositivo de pressão adicional que aplica pressão quando o motorista não está freando. A unidade hidráulica distribui a pressão do freio para as rodas do freio. O interruptor da luz de freio foi projetado para acender as luzes de freio se o motorista não frear quando o sistema ESP está ligado. O ESP às vezes pode ser desativado com um botão no painel, o que é conveniente, por exemplo, ao dirigir com correntes para neve. Desligar ou ligar o sistema é indicado por um indicador aceso no painel de instrumentos.
O ESP permite que você ultrapasse um pouco os limites das leis da física e, assim, aumente a segurança ativa. Se todos os carros estivessem equipados com ESP, cerca de um décimo dos acidentes poderiam ser evitados. O sistema verifica constantemente a estabilidade se não estiver desligado. Assim, o motorista tem uma maior sensação de segurança, especialmente em estradas com gelo e neve. Uma vez que o ESP corrige a direção de deslocamento na direção desejada e compensa os desvios causados pela derrapagem, ele reduz significativamente o risco de acidentes em situações críticas. No entanto, deve ser enfatizado de uma vez que mesmo o ESP mais moderno não salvará um motorista imprudente que não segue as leis da física.
Como ESP é uma marca comercial da BOSCH e Mercedes, outros fabricantes usam o sistema Bosch e o nome ESP ou desenvolveram seu próprio sistema e usam uma sigla diferente (própria).
Acura–Honda: Controle de Estabilidade do Veículo (VSA)
Alfa Romeo: Controle Dinâmico de Veículos (VDC)
Audi: Programa Eletrônico de Estabilidade (ESP)
Bentley: Programa de Estabilidade Eletrônica (ESP)
BMW: vrátane Dynamic Traction Control DSC
Bugatti: Programa Eletrônico de Estabilidade (ESP)
Buick: StabiliTrak
Cadillac: StabiliTrak e Active Front Steering (AFS)
Chery Car: Programa de Estabilidade Eletrônica
Chevrolet: StabiliTrak; Manuseio ativo (Lin Corvette)
Chrysler: Programa Eletrônico de Estabilidade (ESP)
Citroën: Programa de Estabilidade Eletrônica (ESP)
Dodge: Programa de Estabilidade Eletrônica (ESP)
Daimler: Programa Eletrônico de Estabilidade (ESP)
Fiat: Programa Eletrônico de Estabilidade (ESP) e Controle Dinâmico do Veículo (VDC)
Ferrari: Controle estabelecido (CST)
Ford: AdvanceTrac com Controle de Estabilidade de Capotamento (RSC), Dinâmica do Veículo Interativo (IVD), Programa de Estabilidade Eletrônica (ESP) e Controle Dinâmico de Estabilidade (DSC)
Motores Gerais: StabiliTrak
Holden: Programa Eletrônico de Estabilidade (ESP)
Hyundai: Programa Eletrônico de Estabilidade (ESP), Controle Eletrônico de Estabilidade (ESC), Assistência à Estabilidade do Veículo (VSA)
Infiniti: Controle Dinâmico de Veículo (VDC)
Jaguar: Controle Dinâmico de Estabilidade (DSC)
Jeep: Programa Eletrônico de Estabilidade (ESP)
Kia: Controle Eletrônico de Estabilidade (ESC) e Programa Eletrônico de Estabilidade (ESP)
Lamborghini: Programa Eletrônico de Estabilidade (ESP)
Land Rover: Controle Dinâmico de Estabilidade (DSC)
Lexus: Vehicle Dynamics Integrated Management (VDIM) e Vehicle Stability Control (VSC)
Lincoln: AdvanceTrac
Maserati: Programa de Estabilidade Maserati (MSP)
Mazda: Controle Dinâmico de Estabilidade (DSC), vrátane Controle Dinâmico de Tração
Mercedes-Benz: Programa de Estabilidade Eletrônica (ESP)
Mercury: AdvanceTrac
MINI: Controle de estabilidade dinâmica
Mitsubishi: MULTI-MODE Active Stability Control and Traction Control a Active Stability Control (ASC)
Nissan: Controle Dinâmico de Veículo (VDC)
Oldsmobile: Sistema de Controle de Precisão (PCS)
Opel: Programa Eletrônico de Estabilidade (ESP)
Peugeot: Programa de Estabilidade Eletrônica (ESP)
Pontiak: Stabili Trak
Porsche: Porsche Stability Control (PSM)
Proton: programa de estabilização eletrônica
Renault: Programa de Estabilidade Eletrônica (ESP)
Grupo Rover: Controle Dinâmico de Estabilidade (DSC)
Saab: Programa de Estabilidade Eletrônica (ESP)
Saturno: StabiliTrak
Scania: Programa Eletrônico de Estabilidade (ESP)
SEAT: Programa Eletrônico de Estabilidade (ESP)
Škoda: Programa de Estabilidade Eletrônica (ESP)
Inteligente: Programa Eletrônico de Estabilidade (ESP)
Subaru: Controle da Dinâmica do Veículo (VDC)
Suzuki: Programa de Estabilidade Eletrônica (ESP)
Toyota: Vehicle Dynamics Integrated Management (VDIM) e Vehicle Stability Control (VSC)
Vauxhall: Programa de Estabilidade Eletrônica (ESP)
Volvo: Estabilidade Dinâmica e Controle de Tração (DSTC)
Volkswagen: Programa de Estabilidade Eletrônica (ESP)
