
ລະບົບຂັບທັງ ໝົດ 4 ຄັນ
ເນື້ອໃນ
ການຈັດການຍານພາຫະນະແມ່ນ ໜຶ່ງ ໃນປັດໃຈທີ່ ສຳ ຄັນທີ່ສຸດທີ່ຂຶ້ນກັບຄວາມປອດໄພທາງຖະ ໜົນ. ພາຫະນະທີ່ທັນສະໄ Most ສ່ວນໃຫຍ່ແມ່ນມີລະບົບສາຍສົ່ງທີ່ສົ່ງແຮງບິດໄປຫາລໍ້ຄູ່ ໜຶ່ງ (ຂັບລໍ້ ໜ້າ ຫຼືດ້ານຫຼັງ). ແຕ່ພະລັງງານສູງຂອງເຄື່ອງຈັກໄຟຟ້າ ຈຳ ນວນ ໜຶ່ງ ກຳ ລັງບັງຄັບໃຫ້ຜູ້ຜະລິດລົດຍົນຜະລິດການດັດແປງຂັບລໍ້ທັງົດ. ຖ້າເຈົ້າໂອນແຮງບິດຈາກມໍເຕີທີ່ມີປະສິດທິພາບສູງໄປຫາເພົາອັນ ໜຶ່ງ, ການລໍ້ລໍ້ໃນການຂັບຂີ່ຈະເກີດຂື້ນຢ່າງຫຼີກລ່ຽງບໍ່ໄດ້.
ເພື່ອເຮັດໃຫ້ພາຫະນະຢູ່ເທິງຖະ ໜົນ ມີຄວາມstabilັ້ນຄົງແລະເຮັດໃຫ້ມັນມີຄວາມປອດໄພແລະເຊື່ອຖືໄດ້ຫຼາຍຂຶ້ນໃນຮູບແບບການຂັບຂີ່ແບບສະປອດ, ມັນຈໍາເປັນຕ້ອງແຈກຢາຍແຮງບິດໃຫ້ກັບລໍ້ທັງົດ. ອັນນີ້ເພີ່ມຄວາມstabilityັ້ນຄົງແລະການຄວບຄຸມການຂົນສົ່ງຢູ່ພື້ນຜິວຖະ ໜົນ ທີ່ບໍ່ableັ້ນຄົງ, ເຊັ່ນ: ນໍ້າກ້ອນ, ຂີ້ຕົມຫຼືດິນຊາຍ.

ຖ້າເຈົ້າແຈກຢາຍຄວາມພະຍາຍາມຢູ່ໃນແຕ່ລະລໍ້ຢ່າງຖືກຕ້ອງ, ເຄື່ອງຈັກບໍ່ຢ້ານແມ້ແຕ່ສະພາບຖະ ໜົນ ທີ່ຮຸນແຮງທີ່ສຸດທີ່ມີພື້ນຜິວບໍ່ສະຖຽນ. ເພື່ອບັນລຸວິໄສທັດດັ່ງກ່າວ, ຜູ້ຜະລິດລົດຍົນໄດ້ພັດທະນາລະບົບທຸກປະເພດທີ່ໄດ້ອອກແບບມາເພື່ອປັບປຸງການຄວບຄຸມລົດຢູ່ໃນສະພາບດັ່ງກ່າວ. ຕົວຢ່າງຂອງອັນນີ້ແມ່ນຄວາມແຕກຕ່າງ (ໃນລາຍລະອຽດເພີ່ມເຕີມວ່າມັນແມ່ນຫຍັງ, ມັນໄດ້ຖືກອະທິບາຍໄວ້ ໃນບົດຄວາມອື່ນ). ມັນສາມາດເປັນແກນລະຫວ່າງແກນຫຼື inter-axle.
ໃນບັນດາການພັດທະນາດັ່ງກ່າວແມ່ນລະບົບ 4Matic, ເຊິ່ງຖືກສ້າງຂຶ້ນໂດຍຜູ້ຊ່ຽວຊານຂອງລົດຍີ່ຫໍ້ Mercedes-Benz ທີ່ມີຊື່ສຽງຂອງເຢຍລະມັນ. ໃຫ້ພິຈາລະນາວ່າອັນໃດເປັນອັນພິເສດຂອງການພັດທະນາອັນນີ້, ມັນປະກົດຂຶ້ນມາໄດ້ແນວໃດແລະມີອຸປະກອນປະເພດໃດແດ່.
ລະບົບລໍ້ຂັບທັງ4ົດ XNUMXMatic ແມ່ນຫຍັງ
ດັ່ງທີ່ໄດ້ແຈ້ງແລ້ວຈາກການແນະ ນຳ, 4Matic ແມ່ນລະບົບຂັບເຄື່ອນທັງwheelົດ, ນັ້ນແມ່ນ, ແຮງບິດຈາກ ໜ່ວຍ ພະລັງງານໄດ້ຖືກແຈກຢາຍໃຫ້ກັບລໍ້ທັງsoົດ, ດັ່ງນັ້ນ, ອີງຕາມສະພາບຖະ ໜົນ, ແຕ່ລະອັນກາຍເປັນອັນດັບ ໜຶ່ງ. ບໍ່ພຽງແຕ່ SUVs ທີ່ເຕັມປ່ຽມເທົ່ານັ້ນທີ່ມີລະບົບດັ່ງກ່າວ (ສຳ ລັບຂໍ້ມູນເພີ່ມເຕີມວ່າມັນເປັນລົດປະເພດໃດ, ແລະມັນແຕກຕ່າງແນວໃດຈາກການຂ້າມຜ່ານ, ອ່ານ ທີ່ນີ້), ແຕ່ລວມທັງລົດໃຫຍ່, ພາຍໃຕ້theາອັດທີ່ມີເຄື່ອງຈັກການເຜົາໃຫມ້ພາຍໃນທີ່ມີພະລັງຕິດຕັ້ງຢູ່.
ຊື່ຂອງລະບົບມາຈາກ 4WD (ເຊັ່ນ: ຂັບ 4 ລໍ້) ແລະອັດຕະໂນມັດMATIC (ກົນໄກການ ດຳ ເນີນງານອັດຕະໂນມັດ). ການກະຈາຍແຮງບິດຖືກຄວບຄຸມດ້ວຍເອເລັກໂຕຣນິກ, ແຕ່ການສົ່ງພະລັງງານດ້ວຍຕົວມັນເອງແມ່ນເປັນປະເພດກົນຈັກ, ບໍ່ແມ່ນການ ຈຳ ລອງແບບເອເລັກໂຕຣນິກ. ທຸກມື້ນີ້, ໃນທຸກ develop ການພັດທະນາດັ່ງກ່າວ, ລະບົບນີ້ໄດ້ຖືກພິຈາລະນາເປັນ ໜຶ່ງ ໃນເຕັກໂນໂລຢີສູງສຸດແລະມີການຕິດຕັ້ງທີ່ຫຼາກຫຼາຍ.
ພິຈາລະນາວ່າລະບົບນີ້ປະກົດຕົວແລະພັດທະນາແນວໃດ, ແລະຈາກນັ້ນອັນໃດລວມຢູ່ໃນໂຄງສ້າງຂອງມັນ.
ປະຫວັດຂອງການສ້າງຂັບລໍ້ທັງົດ
ແນວຄວາມຄິດທີ່ສຸດຂອງການແນະ ນຳ ການຂັບລໍ້ທັງintoົດເຂົ້າໃນພາຫະນະທີ່ມີລໍ້ບໍ່ແມ່ນເລື່ອງໃnew່. ລົດຂັບລໍ້ເຕັມຄັນທໍາອິດແມ່ນລົດກິລາ 60 Dutch Spyker 80 / 1903HP. ໃນເວລານັ້ນ, ມັນເປັນລົດບັນທຸກ ໜັກ ທີ່ໄດ້ຮັບອຸປະກອນທີ່ເdecentາະສົມ. ນອກ ເໜືອ ໄປຈາກການສົ່ງແຮງບິດໄປຫາລໍ້ທັງ,ົດ, ພາຍໃຕ້hoodາປົກຂອງມັນແມ່ນຫົວ ໜ່ວຍ ພະລັງງານນ້ ຳ ມັນແອັດຊັງ 6 ສູບຢູ່ໃນເສັ້ນ, ເຊິ່ງເປັນສິ່ງທີ່ຫາຍາກທີ່ສຸດ. ລະບົບເບຣກເຮັດໃຫ້ການofູນວຽນຂອງລໍ້ທັງslowົດຊ້າລົງ, ແລະມີຄວາມແຕກຕ່າງຫຼາຍເຖິງສາມອັນໃນລະບົບສາຍສົ່ງ, ໜຶ່ງ ໃນນັ້ນແມ່ນສູນກາງ.

ຫຼັງຈາກພຽງແຕ່ ໜຶ່ງ ປີ, ລົດບັນທຸກຂັບທັງlineົດໄດ້ຖືກສ້າງຂຶ້ນເພື່ອຄວາມຕ້ອງການຂອງກອງທັບອອສເຕີຍ, ເຊິ່ງໄດ້ຖືກນໍາສະ ເໜີ ໂດຍ Austro-Daimler. ຕໍ່ມາຮູບແບບເຫຼົ່ານີ້ໄດ້ຖືກໃຊ້ເປັນພື້ນຖານສໍາລັບລົດຫຸ້ມເກາະ. ໃກ້ເຂົ້າໄປສູ່ການເລີ່ມຕົ້ນຂອງສະຕະວັດທີ XNUMX, ການຂັບລໍ້ທັງcouldົດບໍ່ສາມາດເຮັດໃຫ້ໃຜແປກໃຈອີກຕໍ່ໄປ. ແລະ Mercedes-Benz ໄດ້ມີສ່ວນຮ່ວມຢ່າງຈິງຈັງໃນການພັດທະນາແລະປັບປຸງລະບົບນີ້.
ລຸ້ນທີ XNUMX
ເງື່ອນໄຂເບື້ອງຕົ້ນສໍາລັບການເກີດຂຶ້ນຂອງການດັດແປງກົນໄກທີ່ປະສົບຜົນສໍາເລັດແມ່ນການນໍາສະ ເໜີ ຄວາມແປກໃfrom່ຈາກຍີ່ຫໍ້, ເຊິ່ງໄດ້ຈັດຂຶ້ນໃນຂອບຂອງງານວາງສະແດງລົດຍົນທີ່ມີຊື່ສຽງລະດັບໂລກທີ່ Frankfurt. ເຫດການດັ່ງກ່າວໄດ້ຈັດຂຶ້ນໃນປີ 1985. ແຕ່ການຜະລິດລໍ້ທັງgenerationົດລຸ້ນ ທຳ ອິດຈາກຜູ້ຜະລິດລົດຍົນເຢຍລະມັນໄດ້ເຂົ້າສູ່ການຜະລິດສອງປີຕໍ່ມາ.
ຮູບຂ້າງລຸ່ມນີ້ສະແດງໃຫ້ເຫັນແຜນວາດທີ່ໄດ້ຕິດຕັ້ງໃສ່ໃນລຸ້ນ 124 Mercedes-Benz W1984:

ມີການຂັດຂວາງຢ່າງ ໜັກ ຢູ່ດ້ານຫຼັງແລະຄວາມແຕກຕ່າງທາງກາງ (ສຳ ລັບລາຍລະອຽດວ່າເປັນຫຍັງເຈົ້າຈິ່ງ ຈຳ ເປັນຕ້ອງປິດກັ້ນຄວາມແຕກຕ່າງ, ອ່ານ ແຍກຕ່າງຫາກ). ຄວາມແຕກຕ່າງລະຫວ່າງລໍ້ໄດ້ຖືກຕິດຕັ້ງໃສ່ເພົາດ້ານ ໜ້າ, ແຕ່ມັນບໍ່ໄດ້ຖືກບລັອກ, ເນື່ອງຈາກວ່າໃນກໍລະນີນີ້ການຈັດການຂອງຍານພາຫະນະຊຸດໂຊມລົງ.
ລະບົບ 4Matic ທີ່ຜະລິດເປັນຊຸດ ທຳ ອິດແມ່ນມີສ່ວນຮ່ວມໃນການສົ່ງແຮງບິດພຽງແຕ່ໃນກໍລະນີທີ່ມີການofຸນຂອງແກນຕົ້ນຕໍ. ການປິດການ ນຳ ໃຊ້ລໍ້ສີ່ລໍ້ກໍ່ມີໂautomaticດອັດຕະໂນມັດ-ທັນທີທີ່ລະບົບຕ້ານການລັອກລwasອກໄດ້ຖືກເປີດ ນຳ ໃຊ້, ການຂັບສີ່ລໍ້ກໍ່ຖືກປິດ ນຳ ໃຊ້ຄືກັນ.
ໃນການພັດທະນານັ້ນ, ມີສາມຮູບແບບການດໍາເນີນງານ:
- 100% ຂັບຫລັງລໍ້. ແຮງບິດທັງgoesົດໄປທີ່ແກນດ້ານຫຼັງ, ແລະລໍ້ ໜ້າ ຍັງເຫຼືອພຽງແຕ່iveຸນໄດ້;
- ການສົ່ງແຮງບິດບາງສ່ວນ. ລໍ້ດ້ານ ໜ້າ ແມ່ນຂັບເຄື່ອນພຽງບາງສ່ວນ. ຕົວຊີ້ວັດການກະຈາຍແຮງໄປທີ່ລໍ້ດ້ານ ໜ້າ ແມ່ນ 35 ເປີເຊັນ, ແລະຕໍ່ກັບລໍ້ດ້ານຫຼັງ - 65 ເປີເຊັນ. ຢູ່ໃນໂthisດນີ້, ລໍ້ດ້ານຫຼັງຍັງເປັນລໍ້ຫຼັກ, ແລະລໍ້ ໜ້າ ພຽງແຕ່ຊ່ວຍເຮັດໃຫ້ລົດizeັ້ນຄົງຫຼືອອກໄປສູ່ສ່ວນທີ່ດີກວ່າຂອງຖະ ໜົນ;
- ແບ່ງແຮງບິດ 50 ເປີເຊັນ. ໃນໂthisດນີ້, ລໍ້ທັງreceiveົດໄດ້ຮັບອັດຕາສ່ວນຂອງແຮງບິດໃນລະດັບດຽວກັນ. ນອກຈາກນີ້, ຕົວເລືອກນີ້ເຮັດໃຫ້ມັນເປັນໄປໄດ້ທີ່ຈະປິດການລັອກຄວາມແຕກຕ່າງຂອງແກນຫລັງ.
ການດັດແປງລໍ້ລໍ້ທັງThisົດນີ້ໄດ້ຖືກ ນຳ ໃຊ້ເຂົ້າໃນການຜະລິດລົດຍົນຂອງຍີ່ຫໍ້ລົດຈົນຮອດປີ 1997.
ລຸ້ນທີ່ XNUMX
ວິວັດທະນາການຕໍ່ໄປຂອງລະບົບສາຍສົ່ງຂັບລໍ້ທັງfromົດຈາກຜູ້ຜະລິດເຢຍລະມັນເລີ່ມປະກົດຂຶ້ນໃນແບບຂອງ E-class ຄືກັນ-W210. ມັນສາມາດຕິດຕັ້ງໄດ້ສະເພາະກັບລົດເຫຼົ່ານັ້ນທີ່ແລ່ນຢູ່ໃນຖະ ໜົນ ທີ່ມີການສັນຈອນໄປມາທາງຂວາມື, ແລະຫຼັງຈາກນັ້ນພຽງແຕ່ສັ່ງເທົ່ານັ້ນ. ໃນຖານະເປັນ ໜ້າ ທີ່ພື້ນຖານ, 4Matic ໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນ W163 M-class SUVs. ໃນກໍລະນີນີ້, ການຂັບສີ່ລໍ້ແມ່ນເປັນການຖາວອນ.

ລັອກຄວາມແຕກຕ່າງໄດ້ຮັບວິທີການທີ່ແຕກຕ່າງກັນ. ມັນເປັນການລອກແບບລັອກເອເລັກໂຕຣນິກ, ເຊິ່ງຖືກເປີດໃຊ້ໂດຍການຄວບຄຸມແຮງດຶງ. ລະບົບນີ້ເຮັດໃຫ້ການofູນວຽນຂອງລໍ້ເລື່ອນຫຼຸດລົງ, ເນື່ອງຈາກແຮງບິດຖືກແຈກຢາຍບາງສ່ວນໃຫ້ກັບລໍ້ອື່ນ.
ເລີ່ມຕົ້ນດ້ວຍ 4Matic ລຸ້ນນີ້, ຜູ້ຜະລິດລົດຍົນໄດ້ປະຖິ້ມລະບົບລັອກຄວາມແຕກຕ່າງທີ່ເຂັ້ມງວດ. ລຸ້ນນີ້ມີຢູ່ໃນຕະຫຼາດຈົນຮອດປີ 2002.
ລຸ້ນ III
ຮຸ່ນ 4Matic ຮຸ່ນທີສາມໄດ້ປະກົດຕົວໃນປີ 2002, ແລະມີຢູ່ໃນຮູບແບບຕໍ່ໄປນີ້:
- C-class W203;
- S-class W220;
- E-Class W211.

ລະບົບນີ້ຍັງໄດ້ຮັບປະເພດເອເລັກໂຕຣນິກຂອງການຄວບຄຸມລັອກຄວາມແຕກຕ່າງ. ກົນໄກເຫຼົ່ານີ້, ຄືກັບຄົນຮຸ່ນກ່ອນ, ບໍ່ໄດ້ຖືກສະກັດກັ້ນຢ່າງເຄັ່ງຄັດ. ການປ່ຽນແປງດັ່ງກ່າວໄດ້ສົ່ງຜົນກະທົບຕໍ່ຂັ້ນຕອນວິທີການຈໍາລອງການປ້ອງກັນການລື່ນລໍ້ຂອງລົດ. ຂະບວນການນີ້ຖືກຄວບຄຸມໂດຍລະບົບຄວບຄຸມແຮງດຶງ, ເຊັ່ນດຽວກັນກັບລະບົບສະຖຽນລະພາບແບບເຄື່ອນທີ່.
ລຸ້ນ IV
ລຸ້ນທີສາມມີຢູ່ໃນຕະຫຼາດເປັນເວລາສີ່ປີ, ແຕ່ການຜະລິດຂອງມັນບໍ່ໄດ້ສໍາເລັດ. ມັນເປັນພຽງແຕ່ວ່າດຽວນີ້ຜູ້ຊື້ສາມາດເລືອກວ່າຈະສົ່ງລະບົບໃດເພື່ອຕິດຕັ້ງລົດ. ໃນປີ 2006, ລະບົບ 4Matic ໄດ້ຮັບການປັບປຸງຕື່ມອີກ. ມັນສາມາດເຫັນໄດ້ຢູ່ໃນລາຍການອຸປະກອນສໍາລັບ S550. ຄວາມແຕກຕ່າງຂອງສູນທີ່ບໍ່ສົມເຫດສົມຜົນໄດ້ຖືກແທນທີ່. ແທນທີ່ຈະ, ປະຈຸບັນນີ້ໄດ້ມີການ ນຳ ໃຊ້ກ່ອງເກຍດາວເຄາະ. ວຽກງານຂອງລາວໄດ້ສະ ໜອງ ການແຈກຢາຍ 45/55 ເປີເຊັນລະຫວ່າງເພົາດ້ານ ໜ້າ / ດ້ານຫລັງ.
ຮູບພາບສະແດງໃຫ້ເຫັນແຜນວາດຂອງການຂັບລໍ້ທັງ4ົດ XNUMXMatic ລຸ້ນທີສີ່, ເຊິ່ງໄດ້ຖືກໃຊ້ໃນ Mercedes-Benz S-Class:
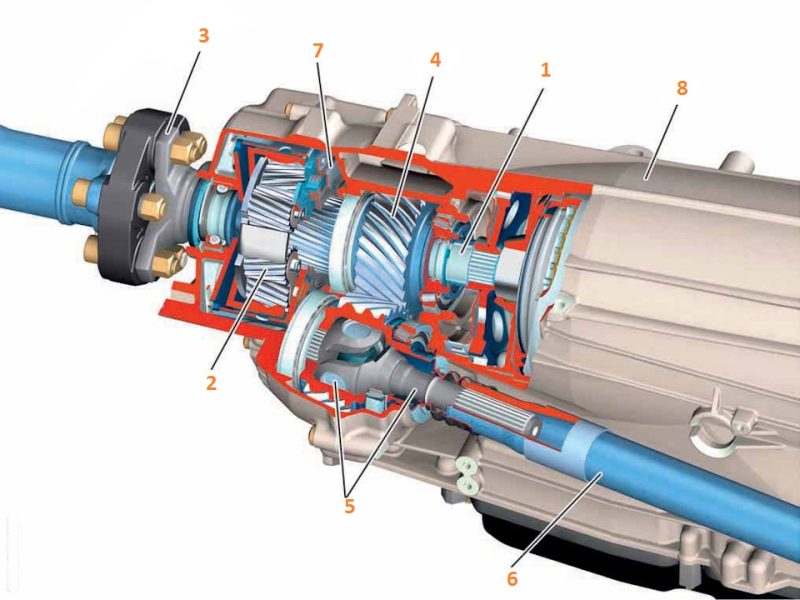
ເນື່ອງຈາກຄວາມຈິງທີ່ວ່າກົນໄກຂອງການຂົນສົ່ງທີ່ທັນສະໄ began ເລີ່ມໄດ້ຮັບຕົວຄວບຄຸມເອເລັກໂຕຣນິກຫຼາຍຂຶ້ນເລື້ອຍ,, ການຄວບຄຸມຄວາມສາມາດໃນການຄວບຄຸມຂອງລໍ້ຂັບໄດ້ມີປະສິດທິພາບຫຼາຍຂຶ້ນ. ລະບົບຕົວມັນເອງຖືກຄວບຄຸມຍ້ອນສັນຍານທີ່ມາຈາກເຊັນເຊີຂອງລະບົບຕ່າງ various ທີ່ຮັບປະກັນຄວາມປອດໄພຂອງເຄື່ອງຈັກ. ພະລັງງານຈາກມໍເຕີໄດ້ຖືກສະ ໜອງ ໃຫ້ຢ່າງຕໍ່ເນື່ອງຕໍ່ກັບລໍ້ທັງົດ.
ປະໂຫຍດຂອງຄົນຮຸ່ນນີ້ແມ່ນມັນໃຫ້ຄວາມສົມດຸນທີ່ດີທີ່ສຸດລະຫວ່າງການຈັດການພາຫະນະທີ່ມີປະສິດທິພາບແລະການດຶງດູດທີ່ດີເລີດເມື່ອເອົາຊະນະພື້ນທີ່ທີ່ຫຍາບຄາຍ. ເຖິງວ່າຈະມີຄວາມໄດ້ປຽບຂອງລະບົບ, ຫຼັງຈາກເຈັດປີຂອງການຜະລິດ, ການພັດທະນາຕໍ່ໄປຂອງຕົນປະຕິບັດຕາມ.
ລຸ້ນ V
ຮຸ່ນ 4Matic ຮຸ່ນທີຫ້າໄດ້ປະກົດຕົວເລີ່ມຕົ້ນໃນປີ 2013, ແລະມັນສາມາດພົບໄດ້ໃນຮູບແບບຕໍ່ໄປນີ້:
- CLA45 AMG;
- GL 500.

ຄວາມແຕກຕ່າງຂອງຄົນລຸ້ນນີ້ແມ່ນວ່າມັນມີຈຸດປະສົງ ສຳ ລັບພາຫະນະທີ່ມີ ໜ່ວຍ ພະລັງງານຂວາງ (ໃນກໍລະນີນີ້, ລະບົບສາຍສົ່ງຈະຫັນ ໜ້າ ລໍ້). ຄວາມທັນສະໄ affected ໄດ້ສົ່ງຜົນກະທົບຕໍ່ການອອກແບບຕົວກະຕຸ້ນ, ພ້ອມທັງຫຼັກການແຈກຢາຍແຮງບິດ.
ໃນກໍລະນີນີ້, ລົດແມ່ນຂັບລໍ້ ໜ້າ. ການແຈກຈ່າຍພະລັງງານໃຫ້ກັບລໍ້ທັງnowົດດຽວນີ້ສາມາດເປີດໃຊ້ງານໄດ້ໂດຍການເປີດໃຊ້ໂmodeດທີ່ສອດຄ້ອງກັນຢູ່ເທິງແຜງຄວບຄຸມ.
ລະບົບ 4Matic ເຮັດວຽກແນວໃດ
ໂຄງສ້າງຂອງລະບົບ 4Matic ປະກອບດ້ວຍ:
- ກ່ອງອັດຕະໂນມັດ;
- ກໍລະນີການຍົກຍ້າຍ, ການອອກແບບທີ່ສະ ໜອງ ການປະກອບຂອງກ່ອງເກຍດາວເຄາະ (ເລີ່ມຈາກລຸ້ນທີສີ່, ມັນຖືກໃຊ້ເປັນທາງເລືອກ ສຳ ລັບຄວາມແຕກຕ່າງຂອງສູນທີ່ບໍ່ເທົ່າທຽມກັນ);
- ລະບົບສາຍສົ່ງ Cardan (ສໍາລັບລາຍລະອຽດວ່າມັນແມ່ນຫຍັງ, ເຊັ່ນດຽວກັນກັບບ່ອນອື່ນທີ່ມັນໃຊ້ຢູ່ໃນລົດ, ອ່ານ ໃນການທົບທວນອີກຄັ້ງ ໜຶ່ງ);
- ຄວາມແຕກຕ່າງດ້ານກົງກັນຂ້າມດ້ານ ໜ້າ (ບໍ່ເສຍຄ່າ, ຫຼືບໍ່ມີການປິດກັ້ນ);
- ຄວາມແຕກຕ່າງດ້ານຂວາງດ້ານຫຼັງ (ມັນຍັງບໍ່ໄດ້ເສຍຄ່າ).
ມີການດັດແປງ 4 ລໍ້ທັງwheelົດຂອງລໍ້ 4Matic. ທຳ ອິດແມ່ນມີຈຸດປະສົງ ສຳ ລັບລົດໂດຍສານ, ແລະອັນທີ່ສອງແມ່ນຕິດຕັ້ງໃສ່ລົດ SUV ແລະລົດຕູ້ຂະ ໜາດ ນ້ອຍ. ຢູ່ໃນຕະຫຼາດທຸກມື້ນີ້, ມັກຈະມີພາຫະນະຕິດຕັ້ງດ້ວຍລະບົບ XNUMXMatic ຮຸ່ນທີສາມ. ເຫດຜົນກໍ່ຄືວ່າລຸ້ນນີ້ມີລາຄາຖືກກວ່າແລະມີຄວາມສົມດຸນທີ່ດີໃນການຮັກສາ, ຄວາມເຊື່ອຖືໄດ້ແລະປະສິດທິພາບ.
ປັດໃຈອີກອັນ ໜຶ່ງ ທີ່ມີອິດທິພົນຕໍ່ຄວາມນິຍົມຂອງຄົນລຸ້ນນີ້ໂດຍສະເພາະແມ່ນການເພີ່ມຂຶ້ນຂອງກິດຈະກໍາຂອງ Mercedes ຜູ້ຜະລິດລົດຍົນເຢຍລະມັນ. ຕັ້ງແຕ່ປີ 2000, ບໍລິສັດໄດ້ຕັດສິນໃຈຫຼຸດຕົ້ນທຶນຂອງຜະລິດຕະພັນ, ແລະໃນທາງກົງກັນຂ້າມ, ເພື່ອເພີ່ມຄຸນນະພາບຂອງແບບຈໍາລອງ. ຍ້ອນສິ່ງນີ້, ຍີ່ຫໍ້ໄດ້ຮັບຄວາມນິຍົມຊົມຊອບຫຼາຍຂຶ້ນແລະຄໍາວ່າ“ ຄຸນະພາບຂອງເຢຍລະມັນ” ໄດ້ມີຄວາມfirmlyັ້ນຄົງຢູ່ໃນໃຈຂອງຜູ້ຂັບຂີ່ລົດຈັກຫຼາຍຂຶ້ນ.
ຄຸນສົມບັດຂອງລະບົບ 4Matic
ລະບົບຂັບລໍ້ທັງSimilarົດທີ່ຄ້າຍຄືກັນເຮັດວຽກໄດ້ດ້ວຍການສົ່ງດ້ວຍຕົນເອງ, ແຕ່ 4Matic ຖືກຕິດຕັ້ງຖ້າລະບົບສາຍສົ່ງເປັນປະເພດອັດຕະໂນມັດ. ເຫດຜົນສໍາລັບຄວາມບໍ່ເຂົ້າກັນໄດ້ກັບກົນຈັກແມ່ນວ່າການກະຈາຍແຮງບິດບໍ່ໄດ້ດໍາເນີນໂດຍຄົນຂັບ, ຄືກັນກັບທຸກລຸ້ນຂອງລົດທີ່ໃຊ້ລໍ້ທັງofົດຂອງສະຕະວັດທີ່ຜ່ານມາ, ແຕ່ໂດຍເຄື່ອງໃຊ້ໄຟຟ້າ. ການປະກົດຕົວຂອງລະບົບສາຍສົ່ງອັດຕະໂນມັດໃນລະບົບສາຍສົ່ງຂອງລົດແມ່ນເງື່ອນໄຂຫຼັກທີ່ຕັດສິນວ່າລະບົບດັ່ງກ່າວຈະຖືກຕິດຕັ້ງຢູ່ໃນລົດຫຼືບໍ່.
ແຕ່ລະລຸ້ນມີຫຼັກການ ດຳ ເນີນງານເປັນຂອງຕົນເອງ. ເນື່ອງຈາກສອງລຸ້ນ ທຳ ອິດແມ່ນຫາຍາກທີ່ສຸດຢູ່ໃນຕະຫຼາດ, ພວກເຮົາຈະສຸມໃສ່ວິທີການເຮັດວຽກຂອງຄົນລຸ້ນສຸດທ້າຍ.
ລຸ້ນທີ III
PP ປະເພດນີ້ໄດ້ຖືກຕິດຕັ້ງໃສ່ທັງລົດເກັງແລະລົດ SUV ຂະ ໜາດ ນ້ອຍ. ໃນລະດັບການຕັດດັ່ງກ່າວ, ການກະຈາຍພະລັງງານລະຫວ່າງເພົາແມ່ນ ດຳ ເນີນໃນອັດຕາສ່ວນ 40 ຫາ 60 ເປີເຊັນ (ໜ້ອຍ ກວ່າ - ຕໍ່ ໜ້າ ເພົາ). ຖ້າລົດເປັນລົດ SUV ທີ່ເຕັມປ່ຽມ, ຈາກນັ້ນແຮງບິດຖືກແຈກຢາຍໃຫ້ເທົ່າກັນ - 50 ເປີເຊັນຕໍ່ແຕ່ລະເພົາ.
ເມື່ອໃຊ້ໃນພາຫະນະການຄ້າຫຼືລົດເກັງທຸລະກິດ, ລໍ້ດ້ານ ໜ້າ ຈະເຮັດວຽກຢູ່ທີ່ 45 ເປີເຊັນແລະລໍ້ຫຼັງຢູ່ທີ່ 55 ເປີເຊັນ. ການດັດແກ້ແຍກຕ່າງຫາກແມ່ນສະຫງວນໄວ້ສໍາລັບແບບ AMG - ອັດຕາສ່ວນເພົາຂອງເຂົາເຈົ້າແມ່ນ 33/67.

ລະບົບດັ່ງກ່າວປະກອບດ້ວຍເພົາໃບພັດ, ກໍລະນີຍົກຍ້າຍ (ສົ່ງແຮງບິດໄປທີ່ລໍ້ຫຼັງ), ຄວາມແຕກຕ່າງລະຫວ່າງແກນຢູ່ທາງ ໜ້າ ແລະດ້ານຫຼັງ, ພ້ອມທັງສອງເພົາດ້ານຫຼັງ. ກົນໄກຫຼັກຢູ່ໃນນັ້ນແມ່ນກໍລະນີໂອນເງິນ. ອຸປະກອນນີ້ແກ້ໄຂການເຮັດວຽກຂອງກ່ອງເກຍ (ປ່ຽນຄວາມແຕກຕ່າງຂອງສູນ). ການສົ່ງແຮງບິດຖືກປະຕິບັດຜ່ານເກຍອາທິດ (ເຄື່ອງມືທີ່ມີເສັ້ນຜ່າສູນກາງແຕກຕ່າງກັນແມ່ນໃຊ້ ສຳ ລັບເພົາດ້ານ ໜ້າ ແລະດ້ານຫຼັງ).
ການຜະລິດ IV
ຮຸ່ນ 4Matic ລຸ້ນທີສີ່ໃຊ້ຄວາມແຕກຕ່າງແບບເປັນຮູບຊົງກະບອກ, ເຊິ່ງຖືກລັອກຜ່ານແຜ່ນສອງແຜ່ນ. ພະລັງງານໄດ້ຖືກແຈກຢາຍ 45/55 ເປີເຊັນ (ຫຼາຍກວ່າຢູ່ດ້ານຫຼັງ). ເມື່ອລົດເລັ່ງໃສ່ນໍ້າກ້ອນ, clutch ຈະລັອກຄວາມແຕກຕ່າງເພື່ອໃຫ້ລໍ້ທັງສີ່ອັນເຂົ້າມາຫຼິ້ນ.
ເວລາຜ່ານລ້ຽວລ້ຽວທີ່ສຽບ, ອາດຈະສັງເກດເຫັນການຕົກຂອງຕົວຍຶດ. ສິ່ງນີ້ເກີດຂື້ນເມື່ອມີຄວາມແຕກຕ່າງ 45 Nm ລະຫວ່າງຄວາມແຕກຕ່າງຂອງລໍ້. ອັນນີ້ ກຳ ຈັດການສວມໃສ່ຢາງທີ່ ໜັກ ກວ່າ. ສໍາລັບການດໍາເນີນງານຂອງ 4Matic, ໄດ້ນໍາໃຊ້ລະບົບ 4ETS, ESP (ສໍາລັບລະບົບປະເພດໃດ, ອ່ານ ທີ່ນີ້) ເຊັ່ນດຽວກັນກັບ ASR.
ລຸ້ນ V
ຄວາມແຕກຕ່າງຂອງລຸ້ນ 4Matic ລຸ້ນທີຫ້າແມ່ນການຂັບເຄື່ອນສີ່ລໍ້ຢູ່ໃນມັນຖ້າຈໍາເປັນ. ສ່ວນທີ່ເຫຼືອຂອງລົດຍັງຄົງຂັບລໍ້ ໜ້າ (ເຊື່ອມຕໍ່ PP). ດ້ວຍເຫດນີ້, ການຂັບຂີ່ຖະ ໜົນ ໃນຕົວເມືອງຫຼືປົກກະຕິຈະປະຫຍັດກວ່າການຂັບທັງwheelົດແບບລໍ້ແບບຖາວອນ. ແກນດ້ານຫຼັງຖືກເປີດໃຊ້ໂດຍອັດຕະໂນມັດເມື່ອເຄື່ອງເອເລັກໂຕຣນິກກວດພົບຄວາມຜິດພາດລໍ້ຢູ່ໃນແກນຫຼັກ.

ການຕັດການເຊື່ອມຕໍ່ຂອງ PP ຍັງເກີດຂຶ້ນຢູ່ໃນຮູບແບບອັດຕະໂນມັດ. ຄວາມແຕກຕ່າງຂອງການດັດແປງນີ້ແມ່ນວ່າໃນຂອບເຂດໃດ ໜຶ່ງ ມັນສາມາດແກ້ໄຂຕໍາ ແໜ່ງ ຂອງລົດໄດ້ໂດຍການເພີ່ມພື້ນທີ່ການຈັບຂອງລໍ້ຂັບຢູ່ໃນມຸມຕ່າງ until ຈົນກວ່າຈະມີການເປີດໃຊ້ກົນໄກຂອງລະບົບສະຖຽນລະພາບອັດຕາແລກປ່ຽນ.
ການອອກແບບລະບົບລວມມີ ໜ່ວຍ ຄວບຄຸມອີກອັນ ໜຶ່ງ, ທີ່ຕິດຕັ້ງຢູ່ໃນເຄື່ອງຈັກອັດຕະໂນມັດ (ເຄື່ອງປລັກຄູ່ແບບປຽກ, ຫຼັກການປະຕິບັດງານທີ່ໄດ້ອະທິບາຍໄວ້) ແຍກຕ່າງຫາກ) ກ່ອງເກຍ. ພາຍໃຕ້ສະພາບປົກກະຕິ, ລະບົບກະຕຸ້ນການກະຈາຍແຮງບິດ 50%, ແຕ່ໃນກໍລະນີສຸກເສີນ, ເຄື່ອງເອເລັກໂຕຣນິກປັບປ່ຽນການຈັດສົ່ງພະລັງງານແຕກຕ່າງກັນ:
- ລົດເລັ່ງ - ອັດຕາສ່ວນແມ່ນ 60 ຫາ 40;
- ລົດໄປຜ່ານຊຸດຂອງການລ້ຽວ - ອັດຕາສ່ວນແມ່ນ 50 ຫາ 50;
- ລໍ້ດ້ານ ໜ້າ ສູນເສຍແຮງດຶງ - ອັດຕາສ່ວນ 10 ຫາ 90;
- ເບກສຸກເສີນ - ລໍ້ ໜ້າ ໄດ້ຮັບ Nm ສູງສຸດ.
ສະຫລຸບ
ທຸກມື້ນີ້, ຜູ້ຂັບຂີ່ລົດຈັກຫຼາຍຄົນໄດ້ຍິນຢ່າງ ໜ້ອຍ ກ່ຽວກັບລະບົບ 4Matic. ບາງຄົນສາມາດທົດສອບດ້ວຍປະສົບການຂອງຕົນເອງກ່ຽວກັບປະສິດທິພາບຂອງການຂັບຂີ່ທັງwheelົດຫຼາຍລຸ້ນຈາກຍີ່ຫໍ້ລົດທີ່ມີຊື່ສຽງລະດັບໂລກ. ລະບົບຍັງບໍ່ທັນມີການແຂ່ງຂັນທີ່ຮຸນແຮງລະຫວ່າງການພັດທະນາດັ່ງກ່າວ, ເຖິງແມ່ນວ່າມັນບໍ່ສາມາດຖືກປະຕິເສດໄດ້ວ່າມີການດັດແປງທີ່ເworthyາະສົມທີ່ຖືກ ນຳ ໃຊ້ໃນຕົວແບບຂອງຜູ້ຜະລິດລົດຍົນອື່ນ,, ຕົວຢ່າງ, Quattro ຈາກ Audi ຫຼື xdrive ຈາກ BMW.
ການພັດທະນາທໍາອິດຂອງ 4Matic ມີຈຸດປະສົງພຽງແຕ່ສໍາລັບຕົວແບບຈໍານວນນ້ອຍ, ແລະຫຼັງຈາກນັ້ນເປັນທາງເລືອກ. ແຕ່ຍ້ອນຄວາມ ໜ້າ ເຊື່ອຖືແລະປະສິດທິພາບຂອງມັນ, ລະບົບໄດ້ຮັບການຍອມຮັບແລະກາຍເປັນທີ່ນິຍົມ. ສິ່ງນີ້ໄດ້ກະຕຸ້ນໃຫ້ຜູ້ຜະລິດລົດຍົນຄິດຄືນໃapproach່ວິທີການຜະລິດລົດສີ່ລໍ້ທີ່ມີການແຈກຈ່າຍໄຟຟ້າອັດຕະໂນມັດ.
ນອກ ເໜືອ ໄປຈາກຄວາມຈິງທີ່ວ່າການຂັບລໍ້ທັງ4ົດ XNUMXMatic ເຮັດໃຫ້ເອົາຊະນະພາກສ່ວນຂອງຖະ ໜົນ ໄດ້ງ່າຍຂຶ້ນດ້ວຍພື້ນຜິວທີ່ມີຄວາມຫຍຸ້ງຍາກແລະບໍ່ableັ້ນຄົງ, ມັນໃຫ້ຄວາມປອດໄພເພີ່ມເຕີມໃນສະພາບທີ່ຮ້າຍແຮງ. ດ້ວຍລະບົບການເຄື່ອນໄຫວແລະການທໍາງານ, ຄົນຂັບສາມາດຄວບຄຸມຍານພາຫະນະໄດ້ຢ່າງເຕັມທີ່. ແຕ່ເຈົ້າບໍ່ຄວນອີງໃສ່ກົນໄກນີ້ຢ່າງສົມບູນ, ເພາະວ່າມັນບໍ່ສາມາດເອົາຊະນະກົດphysicalາຍຮ່າງກາຍໄດ້. ສະນັ້ນ, ໃນກໍລະນີໃດກໍ່ຕາມທີ່ເຈົ້າບໍ່ຄວນລະເລີຍຂໍ້ກໍານົດເບື້ອງຕົ້ນຂອງການຂັບຂີ່ທີ່ປອດໄພ: ຮັກສາໄລຍະທາງແລະກໍານົດຄວາມໄວ, ໂດຍສະເພາະຢູ່ໃນຖະ ໜົນ ທີ່ມີລົມ.
ສະຫຼຸບແລ້ວ - ການທົດສອບຂັບຂະ ໜາດ ນ້ອຍ Mercedes w212 e350 ກັບລະບົບ 4Matic:

ຄຳ ຖາມແລະ ຄຳ ຕອບ:
4 matic ເຮັດວຽກແນວໃດ? ໃນລະບົບສາຍສົ່ງດັ່ງກ່າວ, ແຮງບິດໄດ້ຖືກແຈກຢາຍໃຫ້ແຕ່ລະແກນຂອງຍານພາຫະນະ, ເຮັດໃຫ້ມັນເປັນຊັ້ນນໍາ. ອີງຕາມການຜະລິດ (ມີ 5 ຂອງພວກເຂົາ), ການເຊື່ອມຕໍ່ຂອງແກນທີສອງເກີດຂື້ນໂດຍອັດຕະໂນມັດຫຼືຢູ່ໃນໂຫມດຄູ່ມື.
AMG ຫມາຍຄວາມວ່າແນວໃດ? ຕົວຫຍໍ້ AMG ຫຍໍ້ມາຈາກ Aufrecht (ຊື່ຂອງຜູ້ກໍ່ຕັ້ງບໍລິສັດ), Melchner (ຊື່ຂອງຄູ່ຮ່ວມງານຂອງລາວ) ແລະ Grossashpach (ບ້ານເກີດຂອງ Aufrecht).
