Pergalên stabîlîzasyona elektronîkî (ESP, AHS, DSC, PSM, VDC, VSC)
 Van pergalan piştrast dikin ku wesayît di rewşên krîtîk de bi ewlehî tevdigere, nemaze dema ku li quncikê dikevin. Di dema tevgerê de, pergal çend nîşanan, wek leza an zivirîna dîreksiyonê dinirxînin, û di bûyera xetereya şilbûnê de, pergal dikarin bi şikandina tekerên tekane ve gerîdeyê vegerînin rêça xweya berê. Di wesayîtên bihatir de, pergalên kontrolkirina aramiyê di heman demê de şanoyek çalak jî heye ku li ser rûyê ajokar û şêwaza ajotinê bicîh dibe û bêtir beşdarî ewlehiya ajotinê dibe. Piraniya gerîdeyan li ser wesayîtên xwe pergalek nîşankirinê bikar tînin. ESP (Mercedes-Benz, Skoda, VW, Peugeot û yên din). Bi nîşankirinê AHS (Sîstema pêvajoya çalak) ji hêla Chevrolet ve di wesayîtên xwe de têne bikar anîn, DSC (Kontrola ewlehiya dînamîkî)BMW, psm (Pergala Rêveberiya Stabiliya Porsche), V DC (Kontrolkirina dînamîkên wesayîtê) li ser gerîdeyên Subaru hatî saz kirin, VSC (Kontrolkirina aramiya wesayîtê) li ser Subaru û her weha wesayîtên Lexus jî tê saz kirin.
Van pergalan piştrast dikin ku wesayît di rewşên krîtîk de bi ewlehî tevdigere, nemaze dema ku li quncikê dikevin. Di dema tevgerê de, pergal çend nîşanan, wek leza an zivirîna dîreksiyonê dinirxînin, û di bûyera xetereya şilbûnê de, pergal dikarin bi şikandina tekerên tekane ve gerîdeyê vegerînin rêça xweya berê. Di wesayîtên bihatir de, pergalên kontrolkirina aramiyê di heman demê de şanoyek çalak jî heye ku li ser rûyê ajokar û şêwaza ajotinê bicîh dibe û bêtir beşdarî ewlehiya ajotinê dibe. Piraniya gerîdeyan li ser wesayîtên xwe pergalek nîşankirinê bikar tînin. ESP (Mercedes-Benz, Skoda, VW, Peugeot û yên din). Bi nîşankirinê AHS (Sîstema pêvajoya çalak) ji hêla Chevrolet ve di wesayîtên xwe de têne bikar anîn, DSC (Kontrola ewlehiya dînamîkî)BMW, psm (Pergala Rêveberiya Stabiliya Porsche), V DC (Kontrolkirina dînamîkên wesayîtê) li ser gerîdeyên Subaru hatî saz kirin, VSC (Kontrolkirina aramiya wesayîtê) li ser Subaru û her weha wesayîtên Lexus jî tê saz kirin.
Kurtenivîsa ESP ji Englishngilîzî tê Bernameya aramiya elektronîkî û ji bo bernameya stabîlîzasyona elektronîkî radiweste. Ji navê xwe, diyar e ku ev di warê aramiya ajotinê de nûnerê arîkarên ajokarên elektronîkî ye. Kifşkirin û dûv re bicihanîna ESP -ê di pîşesaziya otomotîvê de pêşkeftinek bû. Rewşek wusa carek bi danasîna ABS -ê çêbû. ESP alîkariya ajokarê bêtecrûbe û pir xwedî tecrûbe dike ku bi hin rewşên krîtîk ên ku di dema ajotinê de çêdibin re bisekine. Hejmarek senzor di gerîdeyê de daneyên ajotina heyî tomar dikin. Van daneyan bi navgîniya yekîneya kontrolê ve bi daneyên jimartî yên ji bo moda ajotinê ya rast têne berhev kirin. Dema ku cûdahiyek were tespît kirin, ESP bixweber tê çalak kirin û wesayîtê aram dike. ESP ji bo fonksiyona xwe pergalên şasên elektronîkî yên din bikar tîne. Karkerên elektronîkî yên herî girîng di nav wan de pergala şikestina dijî-qefilandinê ya ABS, pergalên dijî-hejandinê (ASR, TCS û yên din) û şîreta li ser xebitandina sensorsên ESP-yên pêwîst hene.
Sîstem ji hêla endezyarên Bosch û Mercedes ve hatî pêşve xistin. Yekem gerîdeya ku bi ESP ve hatî xemilandin coupeya luks a S 1995 (C 600) di Adara 140 -an de bû. Çend meh şûnda, pergalê jî berê xwe da S-Class (W 140) û SL Roadster (R 129). Bihayê vê pergalê ew qas giran bû ku di destpêkê de pergal tenê bi kombînasyona bi jor-dawiya 6,0 V12 motora donzdeh-sîlîndir standard bû, ji bo motorên ESP-yên din ew tenê ji bo lêçûnek giran hate pêşkêş kirin. Bûyera rastîn a ESP -ê ji ber tiştên ku dixuye piçûk bûn û, bi wateyek, rasthatinî. Di sala 1997-an de, rojnamegerên Swêdî ceribandinek aramiyê ji bo nûjeniya wê demê, ku Mercedes A. bû, pêk anîn. Ji surprîza mezin a her kesê ku li wir bû, Mercedes A nikaribû bi ya ku jê re tê gotin ceribandina moşê biserkeve. Vê yekê dest bi karsaziyek kir ku hilberîner neçar kirin ku hilberînê ji bo demek kurt rawestînin. Hewldanên teknîsyen û sêwiranerên li Kargeha Otomobîlên Stuttgartê ji bo dîtina çareseriya rast a pirsgirêkê bi serfirazî tac kirin. Li ser bingeha gelek ceribandinan, ESP bû perçeyek standard a Mercedes A. ESP rê li ber karanîna di wesayîtên navîn û piçûk de vekiriye. Jidayikbûna ESP-ê di warê ajotina ewledar de şoreşek rastîn bû, û îro ew ne tenê bi saya Mercedes-Benz-ê berbelav belav bûye. Hebûna ESP, ku pêşve diçe û naha çêkerê wê yê herî mezin e, ji hebûna ESP re gelek alîkarî kir.
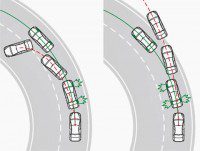
Di piraniya pergalên elektronîkî de, mêjî yekîneya kontrola elektronîkî ye, û ev yek bi ESP re ne wusa ye. Erka yekîneya kontrolê ev e ku di dema ajotinê de nirxên rastîn ên ji senzoran bi nirxên hesabkirî re berhev bike. Arasteya pêwîst ji hêla goşeya zivirandinê û leza zivirîna çerxan ve tê destnîşankirin. Mercên ajotinê yên rastîn li ser bingeha leza paşîn û zivirîna wesayîtê li dora eksê wê yê vertîkal têne hesibandin. Ger veqetînek ji nirxên hesabkirî were tesbît kirin, pêvajoya aramkirinê tê çalak kirin. Operasyona ESP torque motorê birêkûpêk dike û bandorê li pergala firandinê ya yek an çend tekeran dike, bi vî rengî tevgera wesayîta nedilxwaz ji holê radike. ESP dikare di quncikê de bindestî û guheztinê rast bike. Bindestiya wesayîtê bi frenkirina çerxa hundir a paşîn ve tê rast kirin. Oversteer bi frenkirina çerxa derve ya pêş tê rast kirin. Dema ku tekerek diyarkirî fren dike, di dema îstîqrarê de hêzên firnê li ser wê tekerê têne çêkirin. Li gorî zagonek sade ya fizîkê, ev hêzên frenê li dora eksena vertîk a wesayîtê torkê diafirînin. Torkeya encam her gav li hember tevgera nedilxwaz radiweste û bi vî rengî dema ku di quncikê de vedigere wesayitê ber bi riya xwestinê ve vedigerîne. Di heman demê de dema ku nezivire otomobîlê ber bi riya rast ve dizivirîne. Mînaka operasyona ESP-ê gava ku axeya pêşiyê zû ji quncikê derdikeve quncikek bilez e. ESP pêşî torque motorê kêm dike. Ger ev kiryar ne bes be, çerxa hundurê paşîn tê şikestin. Pêvajoya îstîqrarê heya ku meyla şemitînê kêm nebe berdewam dike.
ESP li ser bingeha yekîneyek kontrolê ya ku ji ABS û pergalên din ên elektronîkî re hevpar e, wekî belavkerê hêza şikandinê EBV / EBD, rêgezê motora motorê (MSR) û pergalên dijî-skid (EDS, ASR û TCS) ye. Yekîneya kontrolê di her saniyeyê de 143 car daneyan, ango her 7 mîlîçirkeyan pêvajoyê dike, ku hema hema 30 carî ji ya mirov zûtir e. ESP ji bo xebitandinê gelek sensors hewce dike, wek:
- sensor tespîta şikandinê (yekîneya kontrolê ya ku ajokarê wê fren dike agahdar dike),
- senzorên leza ji bo tekerên kesane,
- sensora goşeya çerxeriyê (rêça pêwîst a rêwîtiyê destnîşan dike),
- hestiyariya bilezbûna alîgir (mezinahiya hêzên alîgir ên tevdigerîne, wek hêza centrifugala li ser çalê),
- senzorek zivirîna wesayîtê ya li dora çerxa vertîkal (ji bo nirxandina zivirîna gerîdeyê ya li dora çerxa vertical û diyarkirina rewşa heyî ya tevgerê),
- sensora fişara şikestî (di pergala frenê de pestoya heyî, ya ku ji wan hêzên şikestinê û, ji ber vê yekê, hêzên dirêjahî yên ku li ser wesayîtê tevdigerin têne hesibandin),
- sensora bilezbûna dirêjahî (tenê ji bo wesayîtên ajotinê yên çar teker).
Digel vê yekê, pergala şikestinê pêdivî ye ku amûrek zextê ya din hebe ku dema ku ajokar naşikite zextê dike. Yekîneya hîdrolîk zexta frenê li çerxên şikandî belav dike. Veguheztina tîrêja tîrêjê ji bo ku çirayên tîrêjê vebike hatî çêkirin ger ajokar dema ku pergala ESP -ê veneke frenê neke. ESP carinan dikare bi bişkojkek li ser dashboardê were sekinandin, ku rehet e, mînakî, dema ku hûn bi zincîrên berfê ajotin. Vemirandin an jî vekirina pergalê li ser panelê amûrê bi nîşanek ronkirî tê destnîşan kirin.
Pergala ESP -ê dihêle hûn hinekî sînorên qanûnên fîzîkê bişkînin û bi vî rengî ewlehiya çalak zêde bikin. Ger hemî gerîdeyan bi ESP -ê vebigirin, nêzîkê dehyek qezayan dikare were xilas kirin. Ger pergal bi berdewamî aramiyê kontrol dike ger neyê vemirandin. Ji ber vê yekê, ajokar xwedan hestek ewlehiyê ye, nemaze li ser rêyên qeşa û berfê. Ji ber ku ESP rêça rêwîtiyê di rêça xwestî de rast dike û tewra berevajiyên ku ji ber lêdanê çêdibin telafî dike, ew di rewşên krîtîk de rîska qezayan bi girîngî kêm dike. Lêbelê, divê di yek nefesê de were tekez kirin ku tewra ESP -ya herî nûjen jî dê ajokarek xemsar ku qanûnên fîzîkê naşopîne rizgar neke.
Ji ber ku ESP marqeyek BOSCH û Mercedes e, hilberînerên din an pergala Bosch û navê ESP bikar tînin, an jî pergala xwe pêşve xistine û kurtenivîsek cuda (xwemal) bikar tînin.
Acura–Honda: Kontrola Stability Vehicle (VSA)
Alfa Romeo: Kontrolkirina Dînamîkî ya Otomobîlê (VDC)
Audi: Bernameya Stabiliya Elektronîkî (ESP)
Bentley: Bernameya Stabiliya Elektronîkî (ESP)
BMW: vrátane Dynamic Traction Control DSC
Bugatti: Bernameya Stabiliya Elektronîkî (ESP)
Wêne: StabiliTrak
Cadillac: StabiliTrak û Rêvebera Pêşîn a Çalak (AFS)
Chery Car: Bernameya Stabiliya Elektronîkî
Chevrolet: StabiliTrak; Veguheztina çalak (Lin Corvette)
Chrysler: Bernameya Stabiliya Elektronîkî (ESP)
Citroën: Bernameya Stabiliya Elektronîkî (ESP)
Dodge: Bernameya Stabiliya Elektronîkî (ESP)
Daimler: Bernameya Stabiliya Elektronîkî (ESP)
Fiat: Bernameya Stabiliya Elektronîkî (ESP) û Kontrolkirina Dînamîkî ya Vehicle (VDC)
Ferrari: Kontrolê Avakirin (CST)
Ford: AdvanceTrac with Roll Over Stability Control (RSC), Interactive Vehicle Dynamics (IVD), Electronic Stability Program (ESP) and Dynamic Stability Control (DSC)
Motorên Giştî: StabiliTrak
Holden: Bernameya Stabiliya Elektronîkî (ESP)
Hyundai: Bernameya Stabîliyeta Elektronîkî (ESP), Kontrolkirina Stabîliyeta Elektronîkî (ESC), Alîkariya Stabîliyeta Otomobîlê (VSA)
Infiniti: Vehicle Dynamic Control (VDC)
Jaguar: Kontrolkirina Stabiliya Dînamîkî (DSC)
Jeep: Bernameya Stabiliya Elektronîkî (ESP)
Kia: Kontrolkirina Stabîliyeta Elektronîkî (ESC) û Bernameya Stabiliya Elektronîkî (ESP)
Lamborghini: Bernameya Stabiliya Elektronîkî (ESP)
Land Rover: Kontrolkirina Stabiliya Dînamîkî (DSC)
Lexus: Rêveberiya Entegreyî ya Dînamîka Vehicle (VDIM) û Kontrolkirina Stabîliyeta Vehicle (VSC)
Lincoln: AdvanceTrac
Maserati: Bernameya Stabîliyeta Maserati (MSP)
Mazda: Kontrolkirina Stabîliyeta Dînamîkî (DSC), Kontrolkirina Tevgeriya Dînamîkî vrátane
Mercedes-Benz: Bernameya Stabiliya Elektronîkî (ESP)
Merkur: AdvanceTrac
MINI: Kontrolkirina Stabîliyeta Dînamîkî
Mitsubishi: MULTI-MODE Kontrolkirina Stabîliya Çalak û Kontrola Traksiyonê Kontrolkirina Stabîliyeta Çalak (ASC)
Nissan: Vehicle Dynamic Control (VDC)
Oldsmobile: Pergala Kontrolê ya Rast (PCS)
Opel: Bernameya Stabiliya Elektronîkî (ESP)
Peugeot: Bernameya Stabiliya Elektronîkî (ESP)
Pontiak: Stabili Trak
Porsche: Porsche Stability Control (PSM)
Proton: bernameya stabîlîzasyona elektronîkî
Renault: Bernameya Stabiliya Elektronîkî (ESP)
Koma Rover: Kontrolkirina Stabiliya Dînamîkî (DSC)
Saab: Bernameya Stabiliya Elektronîkî (ESP)
Saturn: StabiliTrak
Scania: Bernameya Stabiliya Elektronîkî (ESP)
SEAT: Bernameya Stabiliya Elektronîkî (ESP)
Odakoda: Bernameya Stabiliya Elektronîkî (ESP)
Smart: Bernameya Stabiliya Elektronîkî (ESP)
Subaru: Vehicle Dynamics Control (VDC)
Suzuki: Bernameya Stabiliya Elektronîkî (ESP)
Toyota: Vehicle Dynamics Integrated Management (VDIM) û Vehicle Stability Control (VSC)
Vauxhall: Bernameya Stabiliya Elektronîkî (ESP)
Volvo: Stabîliyeta Dînamîkî û Kontrolkirina Tevgerê (DSTC)
Volkswagen: Bernameya Stabiliya Elektronîkî (ESP)
