XNUMX륜 구동, 앞 또는 뒤 무엇이 더 나은가
자동차의 드라이브는 엔진에서 바퀴로 토크를 전달한 다음 드라이브가 됩니다. 따라서 모든 차량은 바퀴 공식과 같은 중요한 특성을 갖기 시작합니다. 여기서 첫 번째 숫자는 총 바퀴 수를 의미하고 두 번째 숫자는 운전하는 숫자를 의미합니다.

그러나이 개념은 자동차 섀시의 또 다른 중요한 속성을 반영하지 않습니다. 파트 타임 드라이브로 어떤 차축이 앞을 향하고 있습니까? 전 륜구동 자동차 4 × 4 또는 6 × 6의 경우 이것은 중요하지 않습니다.
사 륜구동이란 무엇입니까, 후방과 전방의 차이점
각 유형에는 고유한 장점과 단점이 있으므로 여전히 상대적인 균형을 유지합니다. 이론적 인 관점에서 볼 때 전 륜구동 또는 후륜 구동 자동차는 하나 또는 다른 바퀴에 견인력을 전달하는 변속기 부품을 간단히 제거하여 전 륜구동에서 얻습니다. 사실 기술은 달성하기 쉽지 않습니다.
전 륜구동 차량의 필수 단위는 차축을 따라 토크를 분배하는 트랜스퍼 케이스 또는 트랜스퍼 케이스입니다.
모노 드라이브 자동차에서는 필요하지 않지만 단순히 제외할 수는 없으며 razdatka는 전원 장치의 일반 구성에 통합되어 있으므로 전체 자동차가 재배치될 수 있습니다.
반대의 경우와 마찬가지로 초기에 동일한 모델의 전륜 구동 자동차 라인에 전 륜구동 수정이 추가되면 큰 합병증이 수반됩니다.
많은 제조업체가 해치백과 세단에 4 × 4 버전을 추가하려고 시도조차 하지 않아 교차 수정을 위한 지상고 증가와 플라스틱 바디 키트로 제한됩니다.
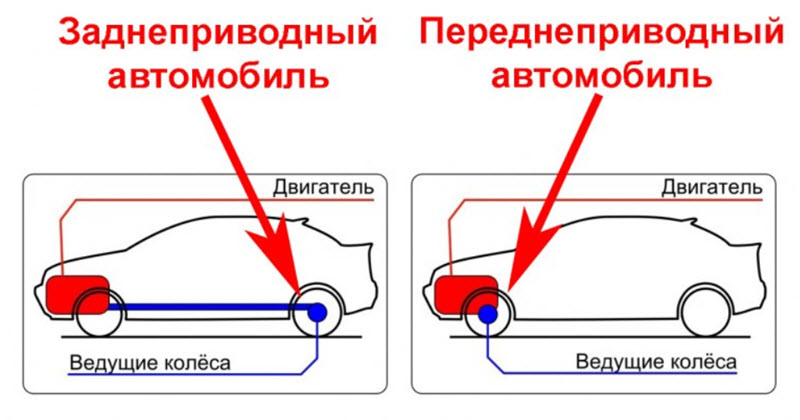
이는 전체 레이아웃에도 적용됩니다. 역사적으로 전 륜구동 차량의 경우 동력 장치가 엔진 실 전체에 위치하고 기어 박스에는 전륜으로가는 등속 조인트 (CV 조인트)가있는 두 개의 샤프트가 장착되어 동시에 구동 및 제어된다는 사실이 이미 개발되었습니다. .
반대로 후륜 구동의 경우 상자가 있는 모터가 자동차 축을 따라 위치한 다음 구동축이 리어 액슬로 이동합니다. XNUMX륜구동은 이 두 경우 모두에서 서로 다른 수준의 복잡성으로 구현될 수 있습니다.
장치 및 작동 원리
토크를 전달하기 위해 변속기를 형성하는 일련의 구성 요소 및 어셈블리가 사용됩니다.
그것은 다음을 포함합니다 :
- 총 기어비의 변화를 담당하는 기어 박스 (기어 박스), 즉 구동 휠 속도에 대한 엔진 샤프트 회전 속도의 비율;
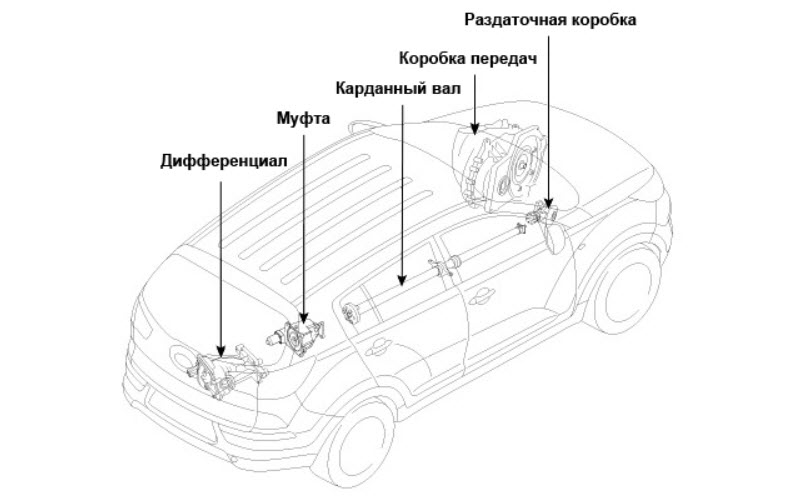
- 트랜스퍼 케이스, 드라이브 액슬 간에 주어진 비율(반드시 동일하지는 않음)으로 토크를 나눕니다.
- 다양한 각도에서 거리를 두고 회전을 전달하는 CV 조인트 또는 Hooke 조인트(크로스)가 있는 카르단 기어;
- 회전 속도와 토크 전달 방향을 추가로 변경하는 드라이브 액슬 기어 박스;
- 기어박스와 휠 허브를 연결하는 액슬 샤프트.

이미 언급했듯이 가로 및 세로 전원 장치의 두 가지 주요 기능이 전체 구성표에서 두드러졌습니다.
- 첫 번째 경우 트랜스퍼 케이스가 기어박스 측면에 부착되는 반면 앵귤러 기어박스라고도 합니다. 레이아웃상의 이유로 앞바퀴 중 하나의 구동축이 통과합니다. 여기서 모멘트는 하이포이드 기어링이 있는 기어 쌍에 의해 리어 액슬로 제거되며 회전이 90도 회전하고 따라 달리는 카단 샤프트로 이동합니다. 자동차.
- 두 번째 경우는 트랜스퍼 케이스가 기어박스 출력 샤프트와 동일한 축에 배치되는 것이 특징입니다. 뒷바퀴의 구동축은 트랜스퍼 케이스의 입력축과 동축으로 위치하며 앞바퀴는 동일한 드라이브 라인을 통해 연결되지만 180도 회전하고 아래 또는 옆으로 변속됩니다.
razdatka는 크로스 컨트리 능력이나 제어 가능성을 높이기 위해 추가 기능이 도입될 때 순간의 분기에만 책임이 있는 매우 단순할 수 있습니다.
- 디멀티플라이어, 즉 도로에서 토크를 증가시키기 위한 오버드라이브;
- 주어진 비율로 모멘트를 분배하는 센터 디퍼렌셜;
- 전송 기능의 자동 제어 시스템에서 액추에이터 역할을 하는 전자기 마찰 클러치;
- 추가 장치에 대한 동력인출장치 샤프트.
4×4 기계의 드라이브 액슬 기어박스는 제어된 차동 장치 또는 전자 클러치의 존재로 인해 복잡해질 수도 있습니다. 하나의 차축에 대한 최대 강제 잠금 및 별도의 휠 제어.
전 륜구동의 종류
다양한 주행 모드에서 휠 사이의 토크를 재분배하여 한편으로는 효율성을 높이고 다른 한편으로는 크로스 컨트리 능력을 높이는 것이 매우 유용합니다. 또한 변속기가 복잡할수록 비용이 많이 들기 때문에 다양한 유형과 등급의 기계가 서로 다른 구동 방식을 사용합니다.
영구
가장 논리적인 것은 모든 도로 조건에서 항상 사륜구동을 사용하는 것입니다. 이를 통해 반응의 예측 가능성과 상황 변화에 대한 기계의 지속적인 준비 상태를 보장할 수 있습니다. 그러나 이것은 상당히 비싸고 추가 연료 비용이 필요하며 항상 정당화되는 것은 아닙니다.
영구 사륜구동(PPP)의 고전적인 단순성 체계는 시대를 초월한 소련 자동차 Niva에 사용됩니다. 종 방향 엔진, 상자, 기어 트랜스퍼 케이스가 짧은 카단 샤프트를 통해 연결되며 두 개의 샤프트가 전방 및 후방 차축으로 이동합니다.
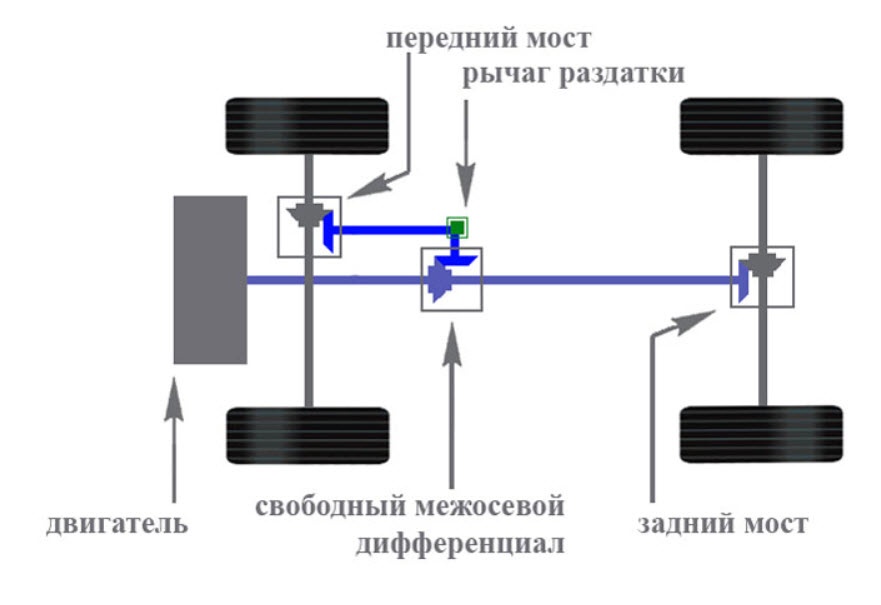
서로 다른 속도에서 전방 및 후방 휠의 회전 가능성을 보장하기 위해(모서리의 건조한 포장 도로에서 중요함) 트랜스퍼 케이스에 인터액슬 프리 디퍼렌셜이 있습니다. -다른 두 사람이 미끄러질 때 도로.
동일한 속도 감소로 추력을 약 두 배로 늘리는 디 멀티 플라이어도있어 상대적으로 약한 엔진에 큰 도움이됩니다.
구동 휠 중 하나가 정지할 때까지 구동 휠에는 항상 토크가 있습니다. 이것이 이러한 유형의 전송의 주요 이점입니다. 동원에 대해 수동으로 생각하거나 복잡한 자동화를 만들 필요가 없습니다.
당연히 PPP의 사용은 하나의 Niva에만 국한되지 않습니다. 그것은 많은 고가의 프리미엄 자동차에 사용됩니다. 문제의 가격이 실제로 중요하지 않은 경우.
동시에 변속기에는 주로 과도한 전력으로 제어 가능성을 향상시키기 위해 대량의 추가 전자 서비스가 제공되며 체계는 이를 허용합니다.

자동적 인
추가 드라이브 액슬을 자동화와 연결하는 데는 여러 가지 버전이 있으며 두 가지 특정 방식을 구별할 수 있으며 BMW 및 기타 여러 프리미엄에 사용되며 대량 크로스오버에 일반적으로 사용되는 후륜 구동 클러치가 있습니다.
첫 번째 경우 전자 드라이브가 있는 razdatka의 클러치에 모든 것이 할당됩니다. 오일에서 작동하는 이 클러치를 클램핑하거나 분해하면 넓은 범위에서 축을 따라 모멘트 분포를 변경할 수 있습니다.
일반적으로 강력한 엔진으로 시동을 걸면 메인 드라이브 뒷바퀴가 미끄러지기 시작하면 앞바퀴가 연결되어 도움을줍니다. 다른 재분배 알고리즘이 있으며 수많은 센서의 판독 값을 읽는 제어 장치의 메모리에 내장되어 있습니다.
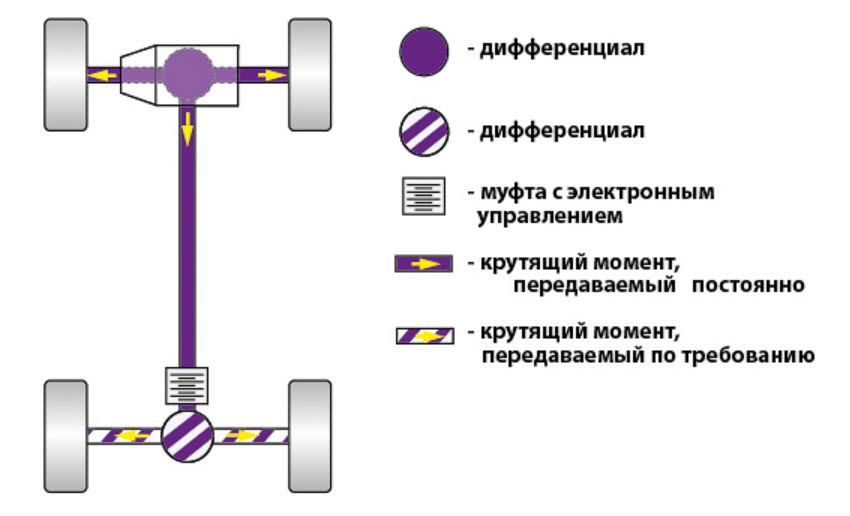
두 번째 경우도 비슷하지만 메인 휠은 앞쪽에 있고 뒤쪽은 카단 샤프트와 액슬 기어 박스 사이의 커플 링을 통해 짧은 시간 동안 연결됩니다.
클러치는 빠르게 과열되지만 오랜 시간 동안 작동하지 않을 것으로 예상됩니다. 때때로 미끄러운 도로나 어려운 회전에서 차를 리어 액슬 위로 약간 밀어야 합니다. 이것이 4 × 4 수정의 거의 모든 크로스 오버가 구축되는 방식입니다.
강요된
영구 작업 장소가 포장 도로에서 벗어난 유틸리티 SUV에 사용되는 가장 단순하고 저렴한 유형의 전 륜구동입니다. 리어 액슬은 일정한 구동 액슬 역할을 하며, 필요한 경우 운전자는 디퍼렌셜 없이 프런트 액슬을 세게 켤 수 있습니다.
따라서 딱딱한 표면에서 자동차는 후륜 구동이어야 합니다. 그렇지 않으면 변속기가 손상됩니다. 그러나 이러한 기계는 안전 여유가 크고 수리가 간단하고 저렴합니다.
많은 수입 픽업 및 SUV에도 이러한 수정 사항이 있으며 고급 옵션 드라이브 버전에서는 때때로 비싸고 복잡합니다.
4WD(4x4)의 장단점
사실 하나 빼기-문제의 가격. 그러나 그것은 어디에나 나타납니다:
- 처음에는 차가 더 어렵 기 때문에 구매할 때 비쌉니다.
- 더 자주 수리가 필요하고 장비가 많을수록 신뢰성이 낮아집니다.
- 추가 회전 부품으로 인해 연료 소비가 증가합니다.
- 무게가 증가하여 역동성과 효율성에 영향을 미칩니다.
- 유지 보수의 복잡성에 반영되는 장치 레이아웃의 복잡성 증가.
다른 모든 것은 장점입니다.
- 완벽한 크로스 컨트리 능력, 모든 바퀴에 토크가 가해집니다.
- 제어되는 차축의 추가 추력 벡터로 인해 기계가 더 잘 제어됩니다.
- 미끄러운 도로에서 향상된 역학, 타이어가 덜 자주 미끄러짐;
- 추력의 재분배는 부품 강도에 대한 요구 사항을 줄입니다.
- 타이어 트레드 고무가 더 고르게 마모됩니다.
이 모든 것이 가격 추가가 그다지 중요하지 않은 강력하고 값 비싼 기계에서 전 륜구동을 널리 사용할 수있게합니다.
사륜구동 자동차를 운전하는 방법
전 륜구동의 모든 가능성을 실현하려면 특정 자동차의 설계 기능을 연구하고 전송 방식이 어떻게 작동하는지 이해해야합니다.
- 아스팔트에서 센터 디퍼렌셜이 없는 플러그인 XNUMX륜 구동을 사용하지 마십시오. 빠른 마모가 발생할 수 있습니다.
- 코너의 미끄러운 도로에서 운전을 연습하기 위해 사륜구동 자동차, 특히 프리 디퍼렌셜 또는 자동 토크 전달 기능이 있는 자동차는 예측할 수 없게 작동하여 전륜 구동에서 후륜 구동으로 또는 그 반대로 동작을 변경할 수 있습니다. 그리고 정반대의 전술로 턴에서 가스 페달로 작업해야합니다. 견인력을 추가하는 자동차는 턴 내부에서 미끄러지면서 사라지거나 앞 차축을 밖으로 밀기 시작할 수 있습니다. 시작된 리어 액슬 스키드의 댐핑에도 동일하게 적용됩니다.
- 겨울에 4x4의 우수한 안정성은 운전자에게 갑자기 손실될 수 있습니다. 모노 드라이브 차량은 항상 견인력 상실을 미리 경고하기 때문에 이에 대비해야 합니다.
- 우수한 크로스 컨트리 능력은 진흙 "매복"이나 설원을 무분별하게 방문해서는 안됩니다. 트랙터 없이 이러한 조건에서 벗어날 수 있는 능력은 변속기의 자동화 능력보다 선택한 타이어에 더 많이 의존합니다.
동시에 합리적인 운전 전략에서 전 륜구동 자동차는 항상 모노 드라이브가 훨씬 더 일찍 발생할 문제를 피하는 데 도움이 될 것입니다. 남용하지 마십시오.

미래에는 모든 자동차가 사륜구동을 받게 될 것입니다. 전기차 기술의 발전 덕분이다. 각 휠에 대한 전기 모터와 고급 전력 전자 장치를 사용하여 계획을 구현하는 것은 매우 쉽습니다.
이 자동차는 더 이상 드라이브 유형에 대한 엔지니어링 지식이 필요하지 않습니다. 운전자는 가속 페달만 제어하고 나머지는 자동차가 알아서 합니다.