Rafræn stöðugleikakerfi (ESP, AHS, DSC, PSM, VDC, VSC)
 Þessi kerfi tryggja að ökutækið hegði sér á öruggan hátt í erfiðum aðstæðum, sérstaklega í beygju. Meðan á hreyfingu stendur, meta kerfin nokkra vísbendinga, svo sem hraða eða snúning stýrisins, og ef hætta er á hálku geta kerfin komið bílnum aftur í upprunalega átt með því að hemja einstök hjól. Í dýrari ökutækjum eru stöðugleikastýrikerfi einnig með virkan undirvagn sem aðlagast yfirborði ökumanns og akstursstíl og stuðlar enn frekar að öryggi aksturs. Flestir bílar nota merkingarkerfi á ökutæki sín. ESP (Mercedes-Benz, Skoda, VW, Peugeot og fleiri). Með merkingu AHS (Virkt vinnslukerfi) notað af Chevrolet í ökutækjum sínum, DSC (Öflugt öryggiseftirlit)BMW, PSM (Stöðugleikastjórnunarkerfi Porsche), V DC (Öflug stjórnun ökutækja) er sett upp á Subaru bíla, VSC (Stjórnun ökutækis stöðugleika) er einnig sett upp á Subaru og Lexus bíla.
Þessi kerfi tryggja að ökutækið hegði sér á öruggan hátt í erfiðum aðstæðum, sérstaklega í beygju. Meðan á hreyfingu stendur, meta kerfin nokkra vísbendinga, svo sem hraða eða snúning stýrisins, og ef hætta er á hálku geta kerfin komið bílnum aftur í upprunalega átt með því að hemja einstök hjól. Í dýrari ökutækjum eru stöðugleikastýrikerfi einnig með virkan undirvagn sem aðlagast yfirborði ökumanns og akstursstíl og stuðlar enn frekar að öryggi aksturs. Flestir bílar nota merkingarkerfi á ökutæki sín. ESP (Mercedes-Benz, Skoda, VW, Peugeot og fleiri). Með merkingu AHS (Virkt vinnslukerfi) notað af Chevrolet í ökutækjum sínum, DSC (Öflugt öryggiseftirlit)BMW, PSM (Stöðugleikastjórnunarkerfi Porsche), V DC (Öflug stjórnun ökutækja) er sett upp á Subaru bíla, VSC (Stjórnun ökutækis stöðugleika) er einnig sett upp á Subaru og Lexus bíla.
Skammstöfunin ESP kemur frá ensku Rafræn stöðugleikaforrit og stendur fyrir rafræna stöðugleikaforrit. Af nafninu sjálfu er ljóst að þetta er fulltrúi rafrænna aðstoðarmanna ökumanna hvað varðar stöðugleika í akstri. Uppgötvun og framkvæmd ESP í kjölfarið var bylting í bílaiðnaðinum. Svipað ástand gerðist einu sinni með tilkomu ABS. ESP hjálpar óreyndum og reyndum ökumanni að takast á við þær mikilvægu aðstæður sem geta komið upp við akstur. Fjöldi skynjara í bílnum skráir núverandi akstursgögn. Þessum gögnum er borið saman í gegnum stjórnbúnaðinn við reiknuð gögn fyrir réttan akstursstilling. Þegar mismunur greinist er ESP sjálfkrafa virkjað og stöðugleiki ökutækisins. ESP notar önnur rafræn undirvagnarkerfi fyrir starfsemi sína. Mikilvægustu rafrænu starfsmennirnir eru ABS-læsingarhemlakerfi, hlífðarbúnaður (ASR, TCS og aðrir) og ráðgjöf um notkun nauðsynlegra ESP skynjara.
Kerfið var þróað af verkfræðingum frá Bosch og Mercedes. Fyrsti bíllinn sem var búinn ESP var S 1995 lúxusbíll (C 600) í mars 140. Nokkrum mánuðum síðar lagði kerfið einnig leið sína í klassíska S-flokkinn (W 140) og SL Roadster (R 129). Verðið á þessu kerfi var svo hátt að í fyrstu var kerfið aðeins staðlað ásamt 6,0 V12 tólf strokka vél á toppnum, fyrir aðrar ESP vélar var það aðeins boðið gegn miklu álagi. Hin raunverulega uppsveifla í ESP stafaði af því að því er virðist litlu og á vissan hátt tilviljun. Árið 1997 gerðu sænskir blaðamenn stöðugleikapróf fyrir þáverandi nýjung sem var Mercedes A. Til mikillar undrunar allra viðstaddra réðst Mercedes A ekki við svokallað elgapróf. Þetta markaði upphaf fyrirtækis sem neyddi framleiðendur til að stöðva framleiðslu til skamms tíma. Viðleitni tæknimanna og hönnuða í bílaverksmiðjunni í Stuttgart til að finna réttu lausnina á vandanum hefur verið krýnd með góðum árangri. Byggt á fjölmörgum prófunum varð ESP staðlaður hluti af Mercedes A. Þetta þýddi aftur á móti framleiðslu framleiðslu þessa kerfis úr væntanlegum tugum þúsunda í hundruð þúsunda og hægt væri að ná hagstæðara verði. ESP hefur greitt brautina fyrir notkun í meðalstórum og litlum ökutækjum. Fæðing ESP var raunveruleg bylting á sviði öruggrar aksturs og í dag er hún tiltölulega útbreidd ekki aðeins Mercedes-Benz að þakka. Tilvist ESP, sem er í þróun og er nú stærsti framleiðandi þess, stuðlaði mikið að tilvist ESP.
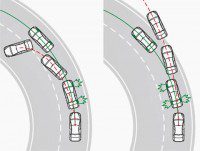
Í flestum rafeindakerfum er heilinn rafeindastýringin og það er ekki raunin með ESP. Verkefni stjórneiningarinnar er að bera saman raungildi frá skynjurum við útreiknuð gildi meðan á akstri stendur. Nauðsynleg stefna er ákvörðuð af snúningshorni og snúningshraða hjólanna. Raunveruleg akstursskilyrði eru reiknuð út frá hliðarhröðun og snúningi ökutækisins um lóðréttan ás þess. Ef frávik frá útreiknuðum gildum greinist er stöðugleikaferlið virkjað. ESP aðgerð stjórnar snúningsvægi hreyfilsins og hefur áhrif á hemlakerfi eins eða fleiri hjóla og útilokar þar með óæskilega hreyfingu ökutækis. ESP getur leiðrétt undirstýringu og yfirstýringu í beygjum. Undirstýri ökutækis er leiðrétt með því að hemla innra afturhjólið. Yfirstýring er leiðrétt með því að hemla ytra framhjólið. Þegar hemlað er á tilteknu hjóli myndast hemlunarkraftar á það hjól við stöðugleika. Samkvæmt einföldu eðlisfræðilögmáli skapa þessir hemlunarkraftar tog um lóðrétta ás ökutækisins. Togið sem myndast vinnur alltaf gegn óæskilegri hreyfingu og skilar þannig ökutækinu í þá átt sem óskað er eftir þegar beygt er. Það snýr bílnum líka í rétta átt þegar hann er ekki að beygja. Dæmi um ESP-aðgerð er hröð beygja þegar framásinn fer fljótt út úr beygjunni. ESP dregur fyrst úr snúningsvægi vélarinnar. Ef þessi aðgerð dugar ekki er hemlað á innra afturhjólinu. Stöðugleikaferlið heldur áfram þar til tilhneigingin til að renna minnkar.
ESP er byggt á stjórnbúnaði sem er sameiginlegur ABS og öðrum rafeindakerfum eins og EBV / EBD bremsukraftdreifingaraðila, togstýringu hreyfils (MSR) og hlífðarbúnaði (EDS, ASR og TCS). Stjórnunareiningin vinnur úr gögnum 143 sinnum á sekúndu, það er að segja á 7 millisekúndna fresti, sem er næstum 30 sinnum hraðari en hjá manni. ESP krefst fjölda skynjara til að starfa, svo sem:
- hemlaskynjaraskynjari (upplýsir stjórnbúnaðinn sem ökumaður hemlar),
- hraða skynjarar fyrir einstök hjól,
- hornhornskynjari stýris (ákvarðar nauðsynlega akstursstefnu),
- hliðarhröðunarskynjari (skráir stærð verkandi hliðarkrafta, svo sem miðflóttaaflið á ferilinn),
- snúningsskynjari ökutækja um lóðrétta ásinn (til að meta snúning ökutækisins um lóðrétta ásinn og ákvarða núverandi hreyfingarástand),
- bremsuþrýstingsskynjari (ákvarðar núverandi þrýsting í hemlakerfinu, þaðan sem hægt er að reikna hemlakrafta og þar með lengdarkrafta sem virka á ökutækið),
- langsum hröðunarskynjari (aðeins fyrir fjórhjóladrifna bíla).
Að auki krefst hemlakerfi viðbótarþrýstibúnaðar sem beitir þrýstingi þegar ökumaður er ekki að hemla. Vökvakerfið dreifir bremsuþrýstingi á bremsuhjólin. Bremsuljósarofinn er hannaður til að kveikja á bremsuljósunum ef ökumaður hemlar ekki þegar ESP kerfið er á. Stundum er hægt að slökkva á ESP með hnappi á mælaborðinu, sem er til dæmis þægilegt þegar ekið er með snjókeðjur. Slökkt eða kveikt á kerfinu er gefið til kynna með upplýstum vísbendingum á mælaborðinu.
ESP gerir þér kleift að ýta nokkuð mörkum eðlisfræðilögmálanna og auka þannig virkt öryggi. Ef allir bílar væru búnir ESP væri hægt að forðast um tíunda hluta slysa. Kerfið stöðugar stöðugleika ef það er ekki slökkt. Þannig hefur ökumaðurinn meiri öryggistilfinningu, sérstaklega á hálku og snjóþungum vegum. Þar sem ESP leiðréttir akstursstefnu í æskilega átt og bætir upp frávik vegna hálku, dregur það verulega úr hættu á slysum í erfiðum aðstæðum. Hins vegar ber að leggja áherslu á það í einni andrá að jafnvel nútímalegasta ESP mun ekki bjarga kærulausum bílstjóra sem fylgir ekki eðlisfræðilegum lögum.
Þar sem ESP er vörumerki BOSCH og Mercedes nota aðrir framleiðendur annaðhvort Bosch kerfið og ESP nafnið, eða hafa þróað sitt eigið kerfi og nota aðra (eigin) skammstöfun.
Acura-Honda: Stöðugleikastýring ökutækja (VSA)
Alfa Romeo: Dynamic Vehicle Control (VDC)
Audi: Rafræn stöðugleikaforrit (ESP)
Bentley: rafræn stöðugleikaáætlun (ESP)
BMW: vrátane Dynamic Traction Control DSC
Bugatti: rafræn stöðugleikaáætlun (ESP)
Staður: StabiliTrak
Cadillac: StabiliTrak og Active Front Steering (AFS)
Chery Car: Electronic Stability Program
Chevrolet: StabiliTrak; Virk meðhöndlun (Lin Corvette)
Chrysler: Electronic Stability Program (ESP)
Citroën: rafræn stöðugleikaáætlun (ESP)
Dodge: Electronic Stability Program (ESP)
Daimler: rafræn stöðugleikaáætlun (ESP)
Fiat: Rafræn stöðugleikaprógramm (ESP) og ökutækisvirk stjórnun (VDC)
Ferrari: komið á fót eftirliti (CST)
Ford: AdvanceTrac með Roll Over Stability Control (RSC), Interactive Vehicle Dynamics (IVD), Electronic Stability Program (ESP) og Dynamic Stability Control (DSC)
General Motors: StabiliTrak
Holden: Electronic Stability Program (ESP)
Hyundai: Rafræn stöðugleikaáætlun (ESP), rafræn stöðugleikastjórnun (ESC), aðstoð við stöðugleika ökutækja (VSA)
Infiniti: Öflug stjórnun ökutækja (VDC)
Jaguar: Dynamic Stability Control (DSC)
Jeppi: rafræn stöðugleikaforrit (ESP)
Kia: Rafræn stöðugleikastjórnun (ESC) og rafræn stöðugleikaforrit (ESP)
Lamborghini: rafræn stöðugleikaforrit (ESP)
Land Rover: Dynamic Stability Control (DSC)
Lexus: Ökutæki Dynamics samþætt stjórnun (VDIM) og stöðugleikastjórnun ökutækja (VSC)
Lincoln: AdvanceTrac
Maserati: Maserati stöðugleikaáætlun (MSP)
Mazda: Dynamic Stability Control (DSC), vrátane Dynamic Traction Control
Mercedes-Benz: rafræn stöðugleikaáætlun (ESP)
Kvikasilfur: AdvanceTrac
MINI: Dynamic Stability Control
Mitsubishi: MULTI-MODE Virkt stöðugleikastýring og gripstýring virkt stöðugleikastýring (ASC)
Nissan: Öflug stjórnun ökutækja (VDC)
Oldsmobile: Precision Control System (PCS)
Opel: Rafræn stöðugleikaáætlun (ESP)
Peugeot: rafræn stöðugleikaáætlun (ESP)
Pontiak: Stabili Trak
Porsche: Porsche Stöðugleikastýring (PSM)
Proton: rafræn stöðugleikaforrit
Renault: rafræn stöðugleikaáætlun (ESP)
Rover Group: Dynamic Stability Control (DSC)
Saab: Rafræn stöðugleikaáætlun (ESP)
Satúrnus: StabiliTrak
Scania: rafræn stöðugleikaáætlun (ESP)
SEAT: Rafræn stöðugleikaáætlun (ESP)
Škoda: Rafræn stöðugleikaforrit (ESP)
Snjall: rafræn stöðugleikaforrit (ESP)
Subaru: Vehicle Dynamics Control (VDC)
Suzuki: rafræn stöðugleikaforrit (ESP)
Toyota: Ökutæki Dynamics Integrated Management (VDIM) og Vehicle Stability Control (VSC)
Vauxhall: rafræn stöðugleikaáætlun (ESP)
Volvo: Dynamic Stability and Traction Control (DSTC)
Volkswagen: Rafræn stöðugleikaáætlun (ESP)
